
本条讨论自动取款机(AGV)控制系统实施方法,该方法分为硬件设置和软件设计部分。

1. 车载控制器
1. 车辆控制器型号
由于车辆控制器是控制系统和整个AGV的核心,应当选择哪种类型的控制器?AGV使用的车辆控制器主要在硬件方面分为三类:

PLC:S7-1200和1500系列,代表西门子产品。带着好运和钦佩 使用AGV工厂PLC的可靠性和稳定性是众所周知的。然而,它的力量是理性的控制。这通常是一种基本的控制练习。西门子PLC费用在2 00至12 00美元之间。
工业管制:对于BFW CX5130等货物,有罗伯特伍德公牛和泉船它是台电脑,也是台电脑。很简单,它发展得非常细致 以至于极耐受干扰它适合于在诸如振动和电磁辐射等危险工业条件下使用。它的体积很小,建筑很紧凑。它能够运行一个典型的操作系统。Linux,像Windows一样。以倍福为例,安装了TypeCAT控制软件后,此命令为 Windows 操作系统添加一个实时内核 。将计算机转换为可在工业环境中使用的实时控制系统。Beifor机器的费用在5 00美元至30 00美元之间。
例如,STM32只需要一台机器。Hydratón, 机械师,是用户之一。相比前两者,单片机的价格低廉,外围建筑的费用不超过1 00美元。使用单一机器的一个缺点是不可能使用单一机器。如果您想被视为成熟产品,您必须投入大量精力来建立外部电路和基本算法。软件开发环境可能更糟。
上述分类并不意味着这三类是分开的。例如,PLC的核心芯片可能是一台单形机器,控制机器的编程语言可以基于梯度、STs等。 PLC在外地使用,操作系统也可以放在一台机器上。因此,建立一个完整的控制器。所以,虽然每个问题都有其自己的适用性,但问题不在于它是否准确。但我们可以互相补偿我已经融入你和我们了
当然,市场上现在有一个独特的AGV控制器。例如,在美国,NDC中的CVC 600。蓝波的ANT,瑞士, 和浙江的MRC 500正常。上海仙子机器人SRC与标准工业运动控制器或PLC相比,这些控制器已发展成先进的导航和运动控制系统。为用户节省了大量工作,为用户做了大量工作。更坚固,更安全然而,费用太昂贵(20 00至60 00美元)。
Siemens的S7-1215C PLC(后为S-1200)被选为AGV车辆控制器。如下图所示。因为西门子的产品模型太广泛了这些模型在接口、性能等方面略有不同。为了具体说明当时购买的是哪一种模型,最好使用订货号。西门子的每个产品都有单独的编号采购将只需要这个号码。根据序列号,在西门子编程软件中也可能发现有关模式。

这是怎么回事?
有些设备可以与其他设备进行通信。例如,从记忆中读取数据,从文字到记忆中读取数据,从记忆中读取数据。这种装备具有很大的权威和意义。因此被称为上位机。需要更多设备才能进入其中一些装置。它不是获得额外设备的权利。这类设备称为低级机器。在本文中,PLC就是下位机,它最强大的机器是编程计算机。
它是关于配置或编程PLC。必须使用网络线路将S1200连接到顶级计算机。将服务器的 IP 地址指定为 PLC 同一区域 。S1200 一般退出默认 IP 地址是因此,你可能会更改计算机的IP地址。这个移动工具是AGV用的最常用的是无线通信。例如,从调度系统接收控制指示。WIFI、Zig Bee和其他无线通信技术就是例子。基金会在实践中越来越受欢迎。让我告诉你它是如何设置的。WIFI是连接西门子PLC的非常方便的方法。你只需要把PLC的以太入口 连接到无线局域网入口然后,可通过一部与相关的WIFI连接的笔记本电脑进入PLC。任何品牌的无线路由器就足够了甚至家庭路由器
2. 驱动器
如果车辆控制器是AGV的大脑,AGV也需要心脏和肌肉才能移动,驱动器为轮式发动机提供电力,这类似于心脏。
2.1 低压驱动器制造商
由于AGV通常用电池供电,其电压通常在12V至72V之间。因此,AGV驱动器是一个低压直流服务器驱动器。AMC、机器人Q、ZAPI、Curtis、Elmo和其他外国低压驱动品牌低气压司机在中国以Stepco、Sensor、Inbor和Kelly等市场销售。
PLC 2 与驱动器连接
驱动器由PLC控制,PLC向它发送命令数据。低成本驱动器可以通过模拟或脉冲信号发送数据。为传输数据,高端驱动器使用受控通信协议。可通过议定书,如RS-232、RS-485、CAN、EtherCAT等,完成此类通信。使用S-1200 CPU模块不可行,因为它缺乏某些通信港口。因此,为了连接到磁盘,需要购买额外的通信模块(CM:社区模式)。上述协议得到通信模块的支持。Siemens 232、485和Canopen的通信单元,例如如下图所示(所有三个单元都具有相同的形式)。应当指出,232和Canopen模块中的插头向公众暴露。485是母亲的头

对于移动设备来说,最常见的通信方式是CAN公共汽车。CAN公共汽车通常用于汽车、挖掘机和AGV之间的通信。CAN公共汽车速度极快(最多为1兆字节/秒)。速度快于485,而且比较稳定(因为使用了差分信号)。抗干扰),更聪明(具有优先权和仲裁制度)。因此,应当优先安排CAN公共汽车。尽管如此,鉴于西门子缺乏CAN连接模块(如果你想使用CAN),这是我第一次从一家第三方公司HMS 购买Canopen模块。这项研究的驱动程序雇用了485个协议。因此,我们选择了485个模块。下一个问题是,S1200能容纳多少个通信模块?答案是:3个。我不关心沟通模块的类型允许的最高人数为3人。种类不限可以混用。如果你的车辆是公交车(485辆,可以是公交车型),然后,485个模块或Canopen模块就足够了。应当指出,232不是公共汽车类型。为了增加两个交流模块,需要两个驱动器。如果贵国的AGV配备了各种无进入协议的传感器(如RFID传感器、磁导航传感器)因此,三个传播单元很可能过于紧张。
传统9针D插头连接西门子485模块。将驱动器连接到PLC, 首先我们会得到DB9电缆。然后用信号线把两个头连接起来现在,我们只用两根电线值得注意的是,西门子的485个接口规格不同于485个标准。标准485信号是一、二和二接收的。另一方面,西门子第485号是3,8(参考手册第1769页)。所以在连线时,按以下顺序焊接:3-2,8-1,如下图所示。

3. 移动机构
AGV需要一个移动机体,通常用于舵、速度和麦克纳姆轮。 每个车体的特征是什么?什么类型的轮子应该用于什么目的?
麦克纳姆车轮的好处是其巨大的机动性,但它是一个复杂的建筑,磨损很大,对地面持批评态度,尽管它存在了30多年,但其实际应用并不大,意味着它不是一个切实可行的产品。
舵是一个高度一体化的流动机构。它由零部件组成,包括轮子、轮子支撑器、齿轮箱、动力驱动器、开关引擎、编码器、有限开关、刹车等。它既能提供牵引力,也可以主动转向,因此,一个舵有两度自由。AGV利用方向舵轮或更多的方向轮来移动整个方向:旋转、倾斜、交叉等等。轮子通常在室内使用。因此,轮子上的大多数材料是聚氨酯。轮子根据电厂所在地分为两类:床和站。分别如下两图所示。(a) 床轮的动力驱动器是横向安装的。因此整体高度很低,某些AGV要求很高(例如,潜水器AGV短到足以在货物下方)。它适于与沉睡舵一起使用;固定轮驱动器已经安装。其整体高度偏高,它的好处是能够孤立电力。在某些情况下(例如生产危险物品的工厂),这是发电厂第一次与外界隔绝。站立舵在这里是可以接受的。意大利的CFR公司和德国的Schabmüller公司是世界上最大的两家车轮制造商。Maruda是一位独特的生产商,后来从CFR中解放出来。这些舵制造商通常只供应舵轮。不提供驱动器,机构提供司机。舵是AGV上最昂贵的部件之一。例如,AGV大约花费10万美元。如果配备两个舵轮,就需要4~5万元,它占车辆总成本的一半以上。不过好消息是,该国舵业开始竞争。这降低了AGV的费用。

四. 磁棒和磁导航传感器
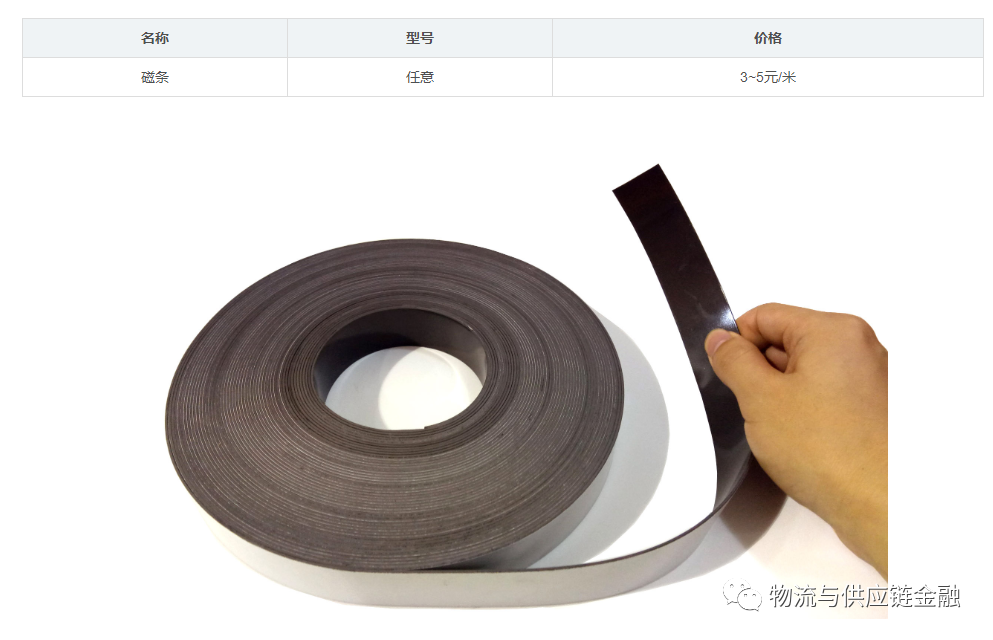
4.1 磁条
磁线导航是当今最常用的AGV导航技术之一。你要做的就是事先把磁带涂在地上磁棒将为AGV提供一条路线。磁带一般为3至5厘米宽。它像胶带一样,一边是平滑的,另一边是粘粘的。铺设工作将通过在地面上埋设一块粘土来完成。磁条具有极性,买之前,先确认是NT或S队磁条极与磁导航传感器极相匹配。然而,某些传感器是兼容的。磁带是丝状的,难以抗拒。因此,如果你不断被轮子挤压,你可以挤压或挤压。为了避免压碎磁棒,大多数AGV公司将轮子放在身体两侧(以不同速度)或平衡对称的地方。
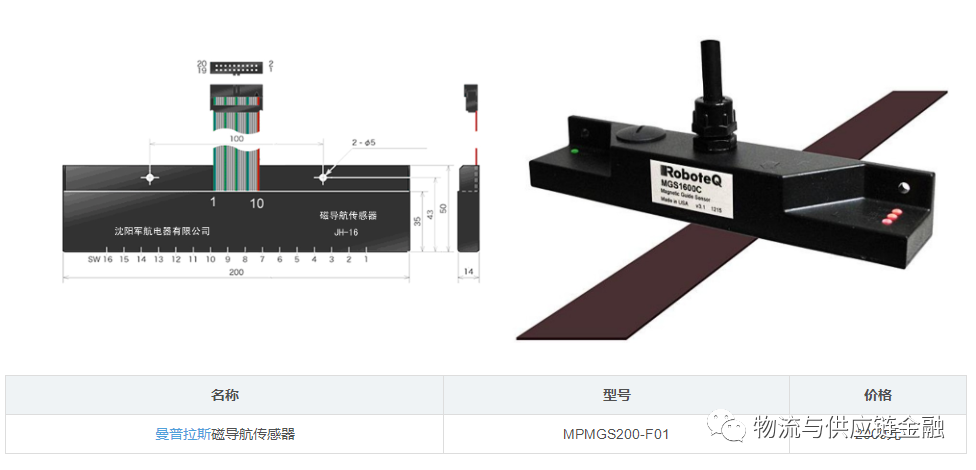
4.2 磁导航
磁共振传感器是磁导航传感器的另一个名称。它用来协助AGV巡逻队步行。磁导航传感器往往安装在AGVs的身体或轮子上。在整个AGV运动中,始终保持磁棒上方的指定高度。磁导航传感器往往安装在与飞行器身体相对的对称轴上。通常对称安装,例如,一个或一个或一个或一个或一个或另一个。磁导航传感器在基本前提下工作。感应器有很多探测器任何仪器都可以探测到磁场。探测器产生磁棒上方(在特定高度内)的信号。在磁棒之外,没有信号 在望外。搜索者通常被称为“点”。感应器的分辨率越高 点数就越多当然价格也越贵。传感器往往被分配到6个点、8个点和16个点。磁导航传感器并不是一项新技术。我取走了一个磁导航传感器这房间里有两种探测器大厅是一个元素,而地磁传感器则是另一个。大会堂的构成特征本应在大学里覆盖。它能感应磁场,成本低廉,但精确度一般较低;地磁传感器主要依赖美国PNI装置。它必须包括专用驱动芯片PNI-12927。这个芯片需要3.33V电源因此,传感器的内部结构是3.3V稳定的电压电路。这个驱动芯片使用SPI公交车。改变电压和处理信号这通常由一台单一的机器进行。磁导航传感器输出信号可以是数字数量或公共汽车数据。富点感应器往往属于公共汽车种类。因为使用数字需要大量的根。如果AGV有四个传感器,每个传感器的分辨率为16点。因此,产出为4x16=64 times16=644x16=64。相关的PLC应有64个数字输入点。其接线将非常繁琐,它还容易发生故障(例如,电线连接薄弱)。
磁导航是直截了当的。价格便宜,但是缺点也不少,干涉是最重要的问题之一。当我调试AGV时,我发现有很多工作要做。即使传感器并不直接高于磁铁(在某些情况下,它们周围根本没有磁带),传感器依然有输出。经过一番思考,我发现什么是错的。AGV正接近轨道铁也很容易被磁化。不仅是铁制品,电缆通电可能导致传感器报告错误。所以,为了避免这些干扰,使用磁棒导航。
磁导航传感器的输出可以是 IO,也可以是一个数字(代表感应器距离磁棒中心的距离)。磁导航传感器与PLC之间有什么联系?如上所述,如果传感器通过公共汽车通信(如485)发送数据,将公共汽车直接连接到相关的通信模块(485)。如果传感器装有数字质量接口,最后,连接到 PLC 的数字输入 。关键的问题是: 你知道传感器的信号是PNP还是NPN吗?它与三极类型相对应。区别在于,当信号出现时,菲律宾国家警察的产出很高(例如24V)。低水平NPN产出(如0V)。通信通信口位于S-1200每个输入端的附近。其目的是确定是输入PNP还是输入NPN类型。如果它是PNP型的,COM的嘴要接通24V了如果你是NPN,就拿0V你可以找到磁铁 并把它的步伐 与最大。当您在磁棒上输入输出时,它会显示 24V, 表示它是PNP类型 。以后你会知道,许多传感器分为PNP型和NPN型。他们看起来都一样。
5. 供电系统
5.1 电池
当AGV首次启动时,需要大量电力。因此,我们必须使用电动电池。铅酸电池和锂电池是最常用的电电池。铅酸电池的使用寿命有限,能量密度低。锂电池密度高,但价格昂贵。还有一个超级震动电池。它的寿命很长,然而,能量密度非常低。所以用的不多。
HAWKER、HOPPEECKE和其他著名电池制造商Hawk AGV的特殊电池标签见下表。铅酸电池的排泄量定级流通常为零.5C。例如,80-Ah电池。额定排放流为零.5乘80=40A0.5乘80=40A0.5乘80=40A0.5乘80=40A0.5乘80=40A0.5乘80=40A铅酸蓄电池的排出电流通常最大为3C。3x80=240A 3x80=240A 3x80=240A 3x80=240A 3x80=240A随着更多电力的使用,电池的电压将下降。开始降低得很慢,当电力停电时,它就会迅速停电。根据这个关系,当你检查电压时,你可以看到有多少电池还剩。是否应该充电。
电动机器是AGV的主要耗能装置。 一般来说,P发电厂的定额功率将在电动标志上标出。 根据初中的物理知识,电能相当于电压和电流的质量,即P=UI。
电动驱动器的定额电压通常很容易获得。因此,海流可以从顶部计算。当然,实际工作功率通常低于定额功率。现在有件事要考虑它取决于AGV、工作方和其他因素的权重。它是电池的容量,计算方法是将电流乘以工作时数。注意,电池的容量和能量是两个截然不同的概念。前者的定义是当量乘以时间(在“Ah”中),而后者的定义是当量乘以电压乘以时间(在“KWh”中)。
5.2 电压变换
如果传感器、控制器等等与电池的输出电压不同,我们必须使用电压转换器模块。它还可以起到稳定的作用。标准传感器为12Vs,控制器为24Vs。因此,需要配对模块。在广州,可选择电压转换器模块。您可选择选择散热器和导引轨。便于散热和固定,48V至24V模块见下图。模块选择的主要考虑因素是其权力。这是它所能提供的最大限度的海流。

6. 开关
6.1 电源开关
在选择主电源开关时,要记住是“自上锁”还是“自动重置”。因为自闭的特征, 即使手指是松开的,如果手指松开,开关仍然关闭,允许电流,自动重置开关按下按钮。电路就会被切断,如下图所示。集装箱的总电开关应该是自锁的。如果你不这样做,你必须按下按钮来激活电路。因此,不购买下图右侧所示的自重开关(代码:XB2-BA31C)。费用约为22美元)。如果你买错的话,它不会造成任何偏差。另一个自有单元ZB2-BZ21 C可供购买。当本模块添加到 XB2-BA31C 开关时, 它会变成自锁开关 。

6.2 急停开关
紧急关闭是所有AGV尸体上都能找到的东西。根据GBT 20721-2006国家标准,“自动制导车辆一般技术条件,第4.2号”,“AGV应该有紧急停车按钮。”在紧急情况下,安装按钮应易于使用。应采用红色按钮,通过按下崩溃按钮,AGV驱动力应该关闭。”如果AGV失去控制,立即停止开关 立即停止运动。从而防止伤害到人。因此,紧急关闭成为最后一道防线。为了保证使用可靠,Schneider XB2-BS 542C可供购买。停止开关的按钮往往很大。方便按下,这就是为什么他们被称为蘑菇头。它一般都是自锁的,松开,按下和旋转。在购买时,唯一重要的是安装的直径。一般选择22毫米就足够了。
7. 电气元件
AGV拥有高功率和低功率。例如,轮式驱动器往往需要相当大的电流。控制器和某些传感器只需要很少量的电力电路必须合理设计防止它们相互干扰,最重要的是,它有错误的电器设备。根据国家标准GBT 30029-2013自动制导车辆(AGV)设计代码第(一)项,控制器中应包括过压、过压、过压和溢流防护。
电路中将添加下列装置:
使用小水流控制巨大的水流是暴露的例子。通过上面的电源开关,允许使用较小的电流。然而,设备的若干部件需要大量电流才能启动。例如舵轮驱动器。开关无法调节微小的和高的海流。这就需要使用联系方式。内部是电磁磁铁使用小流来调节电磁网的吸附。为了传递巨大的电流 电磁网会驱动另一系列的开关组合在AGV上,雇用了直接流动接触者。留意接触器圈 发送一定数量的热量安装期间应考虑辐射和对周围装置的影响。

断路器:超量,低压防护。断路器类似于一个开关,在电量太高,无法使用短路时,断路器会断开来保护设备。
中继:它与开关相似,因为它用微小的电压关闭,以调节联络点,但要小心不要使联络点过热,因为电流过大。
AGV的电源来自电池此外,电池电压很少稳定。使用时,电压波动。尽管西门子的PLC有能力适应输入电压然而,我们需要使用一个24-V至24-V稳定压力模块,在为PLC供电之前稳定电池电压。需要24V电力的其他装置包括:例如磁导航传感器,也是这样。
八. 激光探测传感器
使用接触和非接触感应器来保护AGV, 触角处于接触模式,而激光和超声波感应器处于非接触模式,当然,非接触感应器比较安全,因为屏障可以不受直接触碰地监测。
SICK和HOKUYO是两个经常使用的外国激光传感器品牌。 SICK的Tim 310监测距离高达3米,可选择多个监测区形状。 Tim310的输出是用于检测是否观察到屏障的 I/O 信号。
9. 触摸屏
正在越来越多地在AGV中安装触摸显示器。触摸显示使配置 AGV 设置简单化 。这跟运动率相似 电压等等您不需要每次下载软件到 PLC 。因为我们选择了西门子的PLC当然 西门子是最好的触摸屏结合然而,鉴于西门子的触摸屏的高昂成本,我们选择一个国家生产品牌。国家制造触摸屏的质量非常可靠。而且价格合理,Vittoon和Kunlón是公司的代表。这不是我们唯一会遭遇的事情,也不是我们唯一会遭遇的事情。大多数触摸显示得到支持 。但如果你用不同的PLC牌子所以,你应该和触摸屏幕的制造商核对 看看他们是否支持您的 PLC。否则是无法通讯的。
我去了金龙式触摸屏幕它在24V直流电流上运行。并配有网口,连接触摸屏和S1200到标准网络连接指定与PLC(如PLC)相连的同段触摸屏幕的 IP 地址(如PLC)要设置 IP 地址,请在进入官方界面前先打开电源 。访问设置界面时,请在屏幕上单击任意位置。
如何利用触摸屏幕? 触摸屏幕, 或“ 定型”, 必须编程 。 规划需要使用 Klingon 模式自己的配置软件: MCGS, 可从官方网站免费获取 。
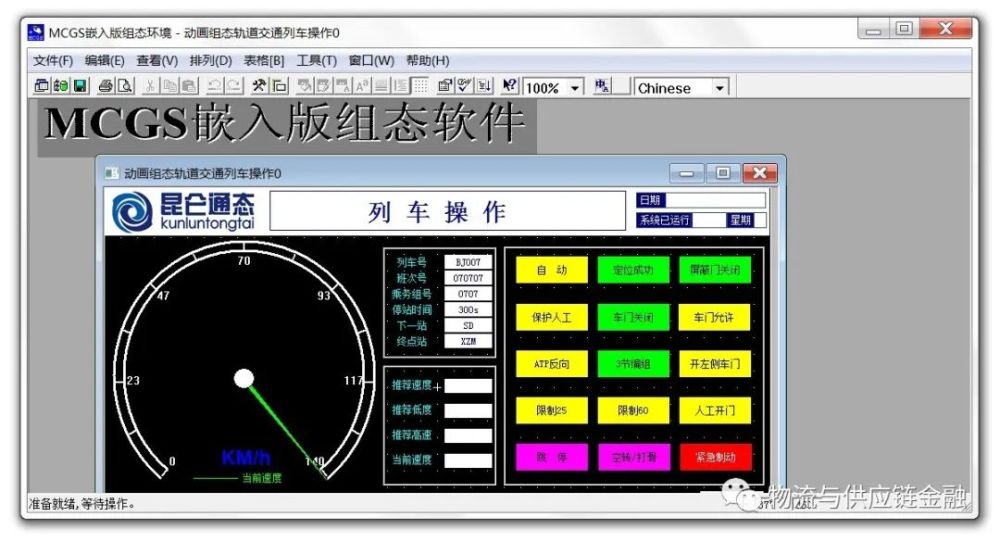
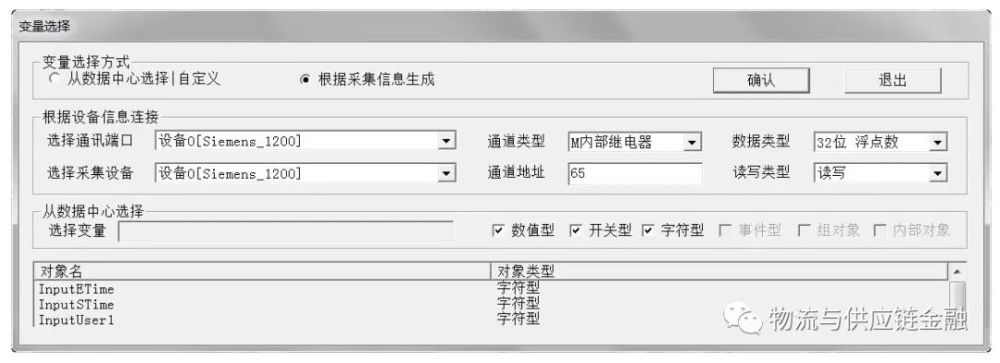
下载并在您的 PC 上安装程序 。应当指出,软件需要PLC地址来读和写数据。在触摸屏幕上,只有一个在线网关。因此,您可以在网络上将触摸屏与您的计算机连接起来。S1200有两个入口,我们可以看到。所以最简单的交流方式就是..S1200应连接到触摸屏上。连接 S1200 到您的 PC 。这也能够进行触摸屏幕编程。触摸屏最基本的职责是读写PLC的内存(也是PLC顶部机器)。此方法非常简单 。在MCGS中,只有PLC变量必须是相互关联的。
10. PLC编程
步骤7:十.1
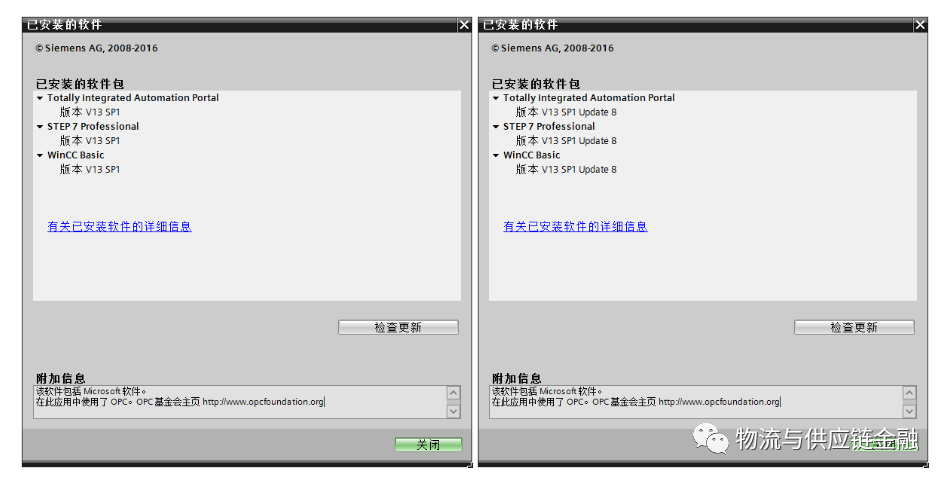
购买S-1200号软件并不使您有权免费使用S-1200号开发软件。但是没关系,互联网上有大量的破解软件。有意思的是,西蒙的人故意泄露了一些这些材料它们可能希望扩展到新的市场。Siemens PLC编程需要使用专门软件:STEP 7。STEP 7的安装过程如下图所示。

实际上,STEP 7是一个旧名称。Siemens现在的目标是将它与许多其他自动化软件平台合并为一个单一平台。这适用于所有Siemens品牌的设备。这个平台叫做TIA门户。本文使用TIA V13。西门子 为了保证连续性该方案有时被称为STEP 7。有时又用 TIA,为了历史目的,我还被称为 STEP 7。西门子的軟體跟硬件一樣多样化仅STEP 7就包含若干变异。例如,SP1的专业版本已在因特网上提供。如下图左所示),每个版本都有一个独特的更新软件包。应当指出,次级方案1可能缺乏某些功能(我将在下文进一步讨论)。结果,我利用了升级后的一揽子计划。具体来说,这个故事是我们对2011年巴基斯坦抗争的特别报导的一部分。如下图右所示。
在安装软件后,我们注意到STEP 7是用于编程的工程组合工具。要使用 PLC,编程只是一方面,宪法也付出了巨大的努力。“配置”简称为“配置”。PLC 输入/产出界面、参数、功能等已配置 。首先,在设备组页面上,选择我们的 PLC 模型。
为了利用PLC,必须使用10.2西门子PLC硬件资源。其几个方面对我来说是可辨识的。现在让我们看看S1215C的特性。1215C有多少内存?连接到PLC,我们需要个人电脑接下来,在图表的左侧,双击“在线和诊断”。接下来,在打开的窗口中,点击“仓库”。如下图所示。
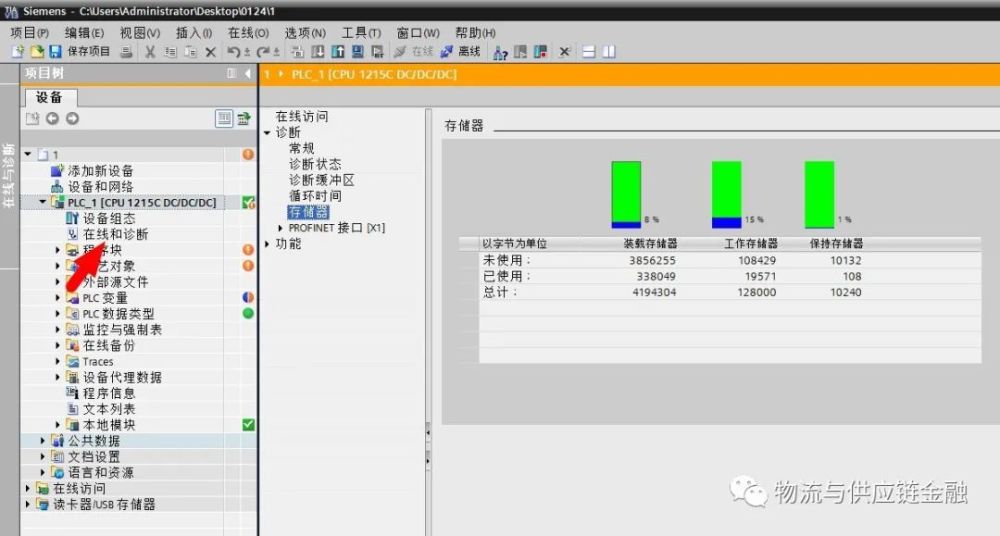
此处显示三个储存装置:装货储存、工作储存和维护储存。
一. 装载储存:4194304 4194304 4194304494304 Byte 10241024=4div 1024div 1024div 1024= 4102410241024=4MB 装载储存:4194304 4194304494304
两个工作记忆:128 00 128 00 128 00 128 00 128 00 128 00 字节1024 = 125 1024 = 125 KB
3 10240 10240240 字节 1024 = 10师 1024 = 101024 = 101024 = 10KB
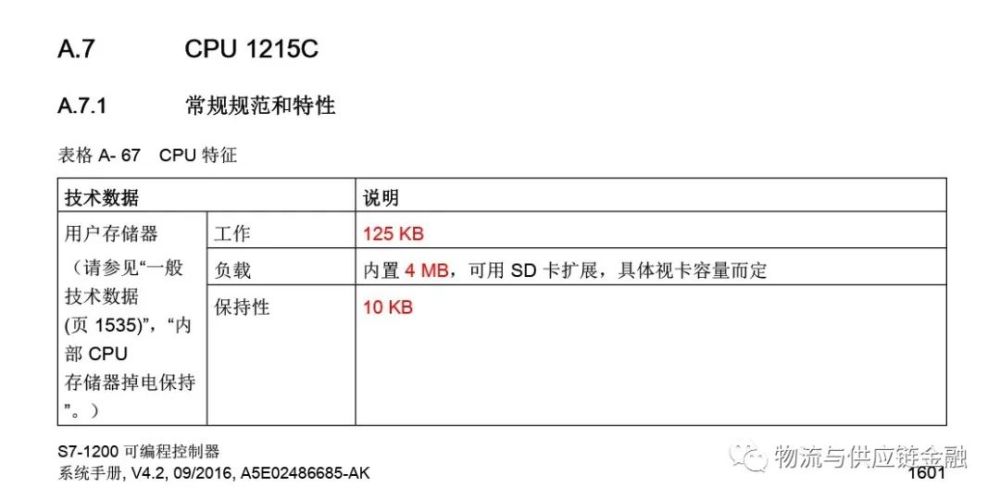
这与系统手册提供的价值相符,该手册如下:
这三者各自产生了何种影响?
一. 装入内存用于存储用户项目文件(例如,硬驱动器等于用户程序和群体信息)。
二. 工作记忆:在执行用户应用程序期间,CPU将一些项目项目从装货储存区复制到工作储存区,这与计算机的内存相当。
三. 存储维护:当丧失电源时数据会保存。如果想要在失去电源后保留一些数据,您必须使用这一记忆。不幸的是,廉价的西门子只给我们10千B。
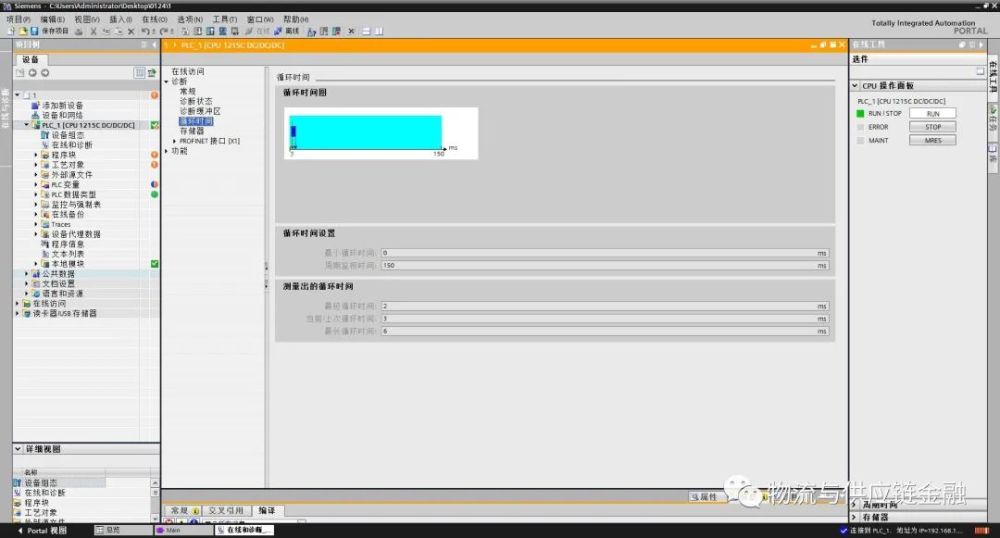
PLC扫描程序需要多长时间?
时间由 PLC 自动记录。 在同一页上, 您可以查看整个 PLC 执行程序所需的时间, 如下图所示 。 这一时间没有设定, 且根据您进程的持续时间而变化, 而通常的执行时间在 3 毫秒之内 。
有10.3西门子PLC软件资源。
西门子提供什么服务?IEC 61131-3是全世界唯一的工业控制语言标准,规定了46项基本功能。西门子都支持。除此以外,我们还使用计时器和其他此类工具。AGV是一种移动机器人。机器人控制在理论上也是确定的。因此,我专注于数学函数。共有18个:
ABS、SQRT、log、LN、EXP、SIN、COS、TAN、ASIN、ACOS、ANTAN都是数字操作。
ADD、Sub、MUL、DIV、MOD、EXPT和MOVE等亚丁亚丁亚丁亚丁亚丁亚丁亚丁亚丁亚丁亚丁、亚丁亚丁亚丁亚丁亚丁亚丁亚丁亚丁、MUL、DIV、MOD、EXPT和MOVE。
当然还有:>、
读取设备手册以找出是否也支持这些基本功能。 在组界面上, CPU 模块双击其他 PLC 函数, 如下图所示的周期计时器 。
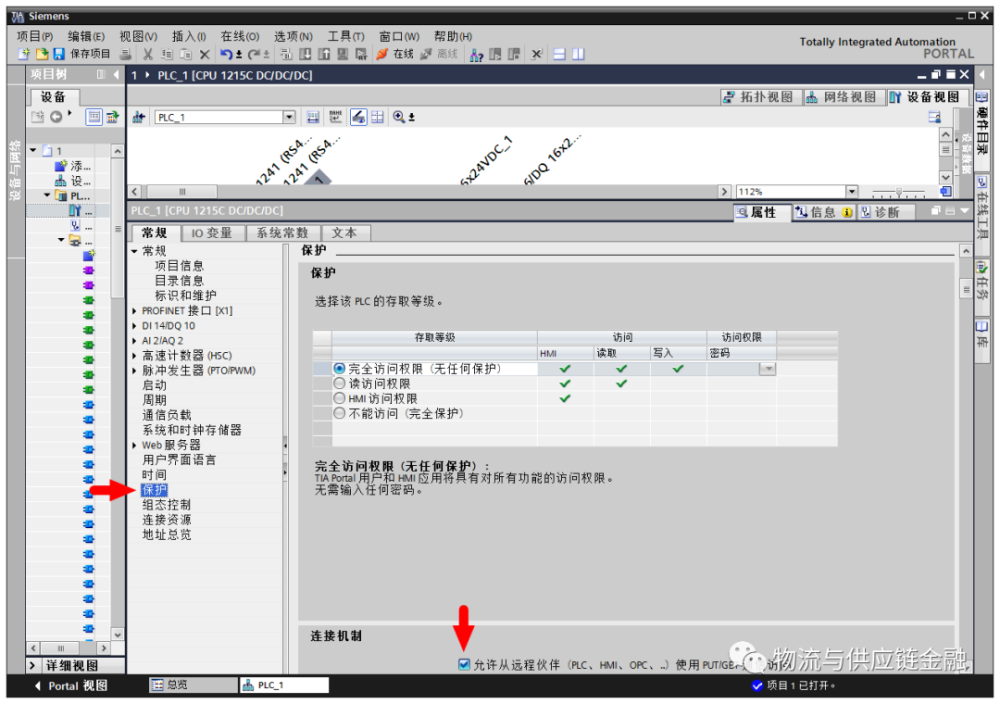
使用触摸屏时值得一提的是,必须检查保护页面上的一个选择, 即“让远方伙伴能够访问PUT/GET通讯”,如下图所示。如果您不选中此选项,您可以看到触摸显示无法读取或写入 PLC 内存中的数据 。让笔者奇怪的是,几乎没有任何手册、课程或其他资源包括这些资料。但却又很重要。
西门子的PLC方案拟订方法
Siemens PLC编程符合世界范围工业方案编制语言标准IEC-611313,使其与牛肉等工厂类似。
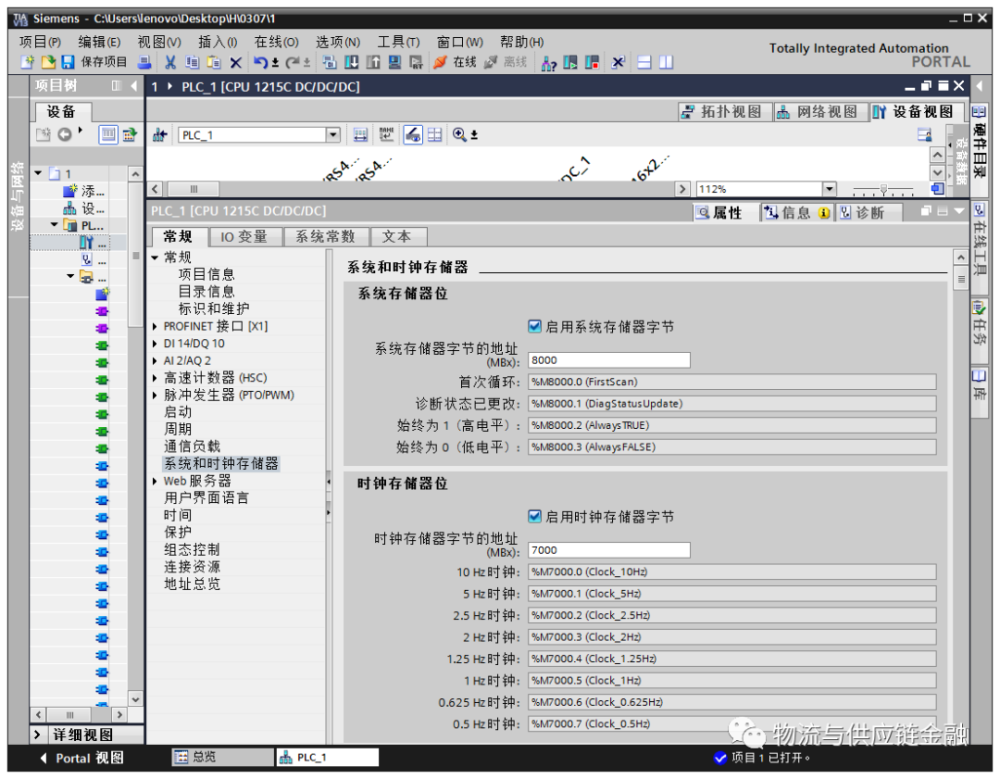
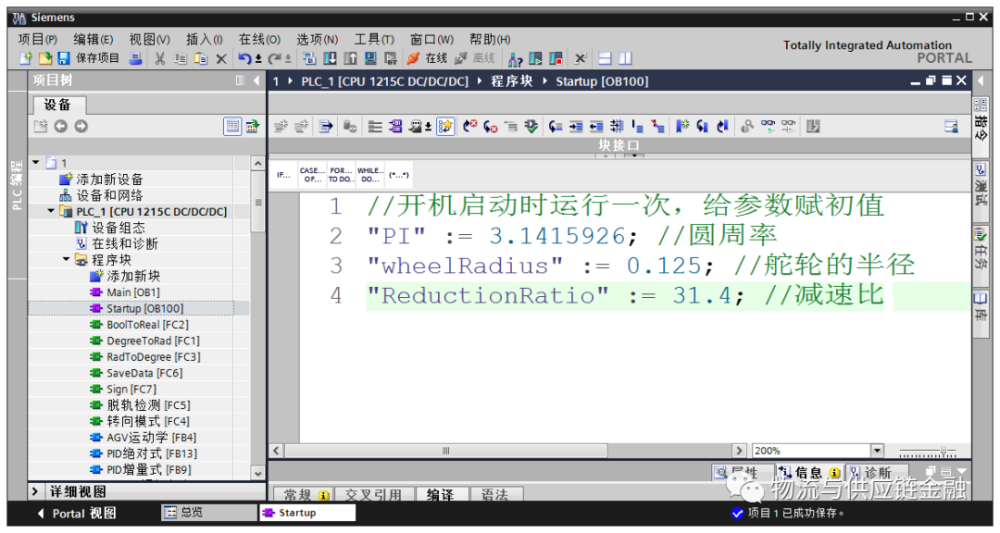
10.4.1 确定常数
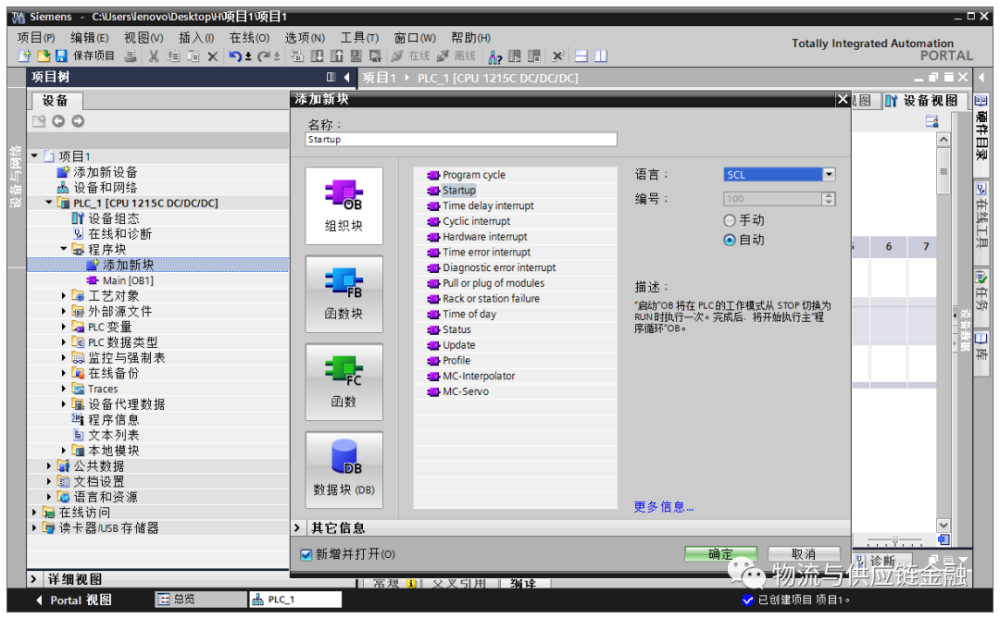
我们应更经常地使用某些重量(例如:如果您经常使用数字来计算, 很容易输入错误 。然而,如果你想修改它, 你必须彻底改变它。非常繁琐。将它描述为全球“可变的”比较实际。PLC和C等高级语言也可以这样说。变量必须是指定的内存位置 。当指定地址时, 您如何看待这些地址?因为常数必须只提供一次。因此,我们决定将它列入启动区。启动区块只有在PLC充电时才执行一次。某些西门子块含有分配给该系统的序列号。例如,从OB100开始。我们注意到,在博图软件中,使用双重引号表示全球变量(例如“PI”)。在本地变量之前有一个相当数字的变量。
界定职能10.four.2
Siemens自带职能只能执行次要任务。为了获得更好的控制,我们必须自己建立一些职能。我发现在创建机器人控制器时 我不可能这样做网上可免费访问的PLC图书馆相对较少。目前,我只是熟悉OSCAT图书馆。我们都在讨论基本逻辑控制但是,很少有人讨论更高层次的数学计算。PLC可能不适合实施复杂的动作控制算法。
以下举例说明如何使用一个基本函数转换角弧度,对STEP 7中的函数进行定制。
(1) 首先,我们建立一个新的功能FC(一个不需要背景数据的较小功能,所以FB没有被利用),所完成的语言选择是SCL语言。 它被称为“DegreeToRad”。
(2) 然后,我们必须明确这一功能的投入。在变量定义栏中,在上文输入项中输入角度InDegree。_ 其他协调员如下图所示。在返回项目中,将DevreeToRad变量的类型改为 Real。在此注意不要修改 DebreeToRad 变量的名称 。
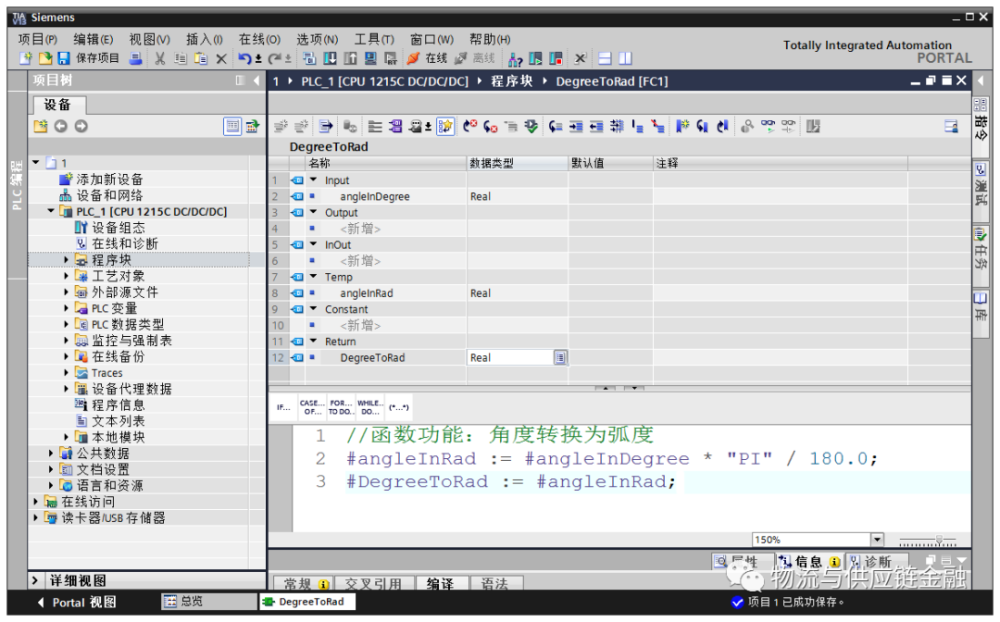
(3) 在下文输入框中,提供一个变式公式。要给变量指定值,请使用 = 。你会注意到,变量 PI 周围有双重报价。额外因素(例如,许多因素出现在角度前InDegree。)用于区分本地变量和全球变量。本地变数由 # 开始表示 。全球变量用引号表示。
10.4. 3 计时器
我们大部分时间都用定时器定时器可以处理您想要导出的时间长度、 延迟触发时间, 以及您想要导出的时间周期信号 。在西门子,每个计时器都对应背景数据块。我一开始经常犯的错误之一是:为了节省时间,只需复制和粘贴定时器块。错误在于,不管你复制多少次, 它永远不会是完美的。事实上,它是同一时间。其余部分将支付初始金额。这一错误导致若干臭名昭著的错误。我很久没头痛了各位一定要注意,每个计时器都用来装载新的计时器。
104 磁中继率
为了让AGV沿着磁棒继续前进我们必须建立必要的控制机制。也就是循迹程序。累犯过程的推理可以相当直截了当。磁导航传感器读数是我们的输入输出由舵轮转动(或过)的速度和轮子转动的速度组成。AGV巴士中心线左侧的磁带我们就往左偏转,然而,另一方面,转向右边。如果它处于中间,它就静止不动。下面的动画描绘了这种控制方法的效果。只有一个传感器和一个舵然而,绕弯行走是可行的。磁导航传感器上有六个点安装在前方,磁带通过红色方形探测到白种人表示没有这种感觉。
声明
具有物流和供应链重点的金融小额信贷