
点击Viewnet Nweon访问参考资料/信息来源。
确定瞳孔间距
人类有各种各样的形状和大小有可能制定新的世界愿景,以适应尽可能多的用户,并给他们一个清晰的画面。还确保设备不刺激鼻子。大多数当前头部显示器都有镜头调整机制。亦即瞳孔间距调整。目前正在调查开发主要的AR/VR公司微软的可比方法。
该公司提出了一项IPD调整,用于评估学生的间隔,然后在专利申请中采取适当行动,题为“确定学生之间的距离”。
在一个实施例中,为了实现深度感知,头部显示设备图像生成系统可以在焦点平面上产生两张虚拟物体的照片。在两个照片中创建虚拟对象相对位置的双倍视图差异 。例如,双眼之间的鸿沟可能是横向的。X 轴将虚拟项目的相对位置分隔为两张图片。x 轴的定义是横向延伸至用户的左、右两侧的轴。与用户的关系,Y轴向上向下垂直延伸。z轴相对于用户向前和向后移动。它还有X轴和Y轴。
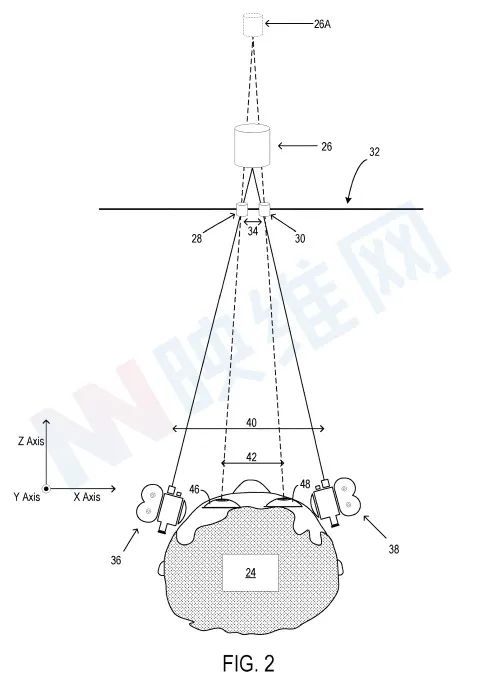
如图2所示,在X轴上,左虚拟相机36和右虚拟相机38的相对位置是40。40的距离可能是头部显示设备10的首个预设 IPD 。有时候,如图2所示,最初预设的IPD以40的距离表示,可能与用户实际的IPD 42不同。因此,在看图28和30时, 左边的图28和30,人们不会看到虚拟项目26 出现在他们期望的深处。
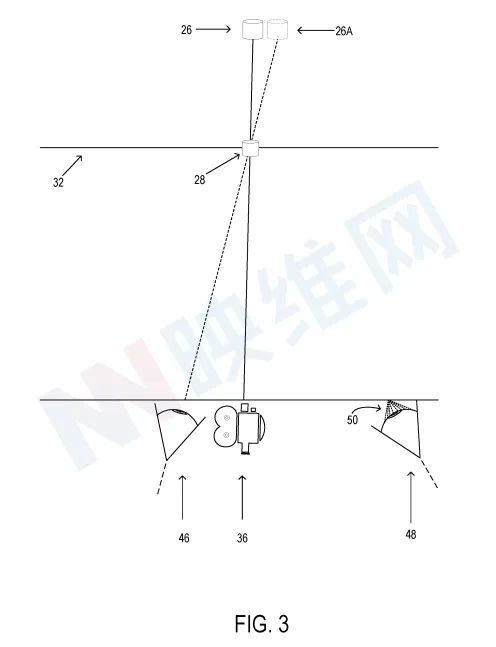
图3是一个单眼IPD错误的例子。在这个示例中,从左侧虚拟相机36的角度检查虚拟项目26。因此,左侧图象28是在第32架焦点飞机上拍摄的。从右虚拟相机的角度看待虚拟对象26, 用户右眼48没有显示头部显示装置 10。因为一只眼睛比另一只更强壮在一个示例中,用户右眼48可以显示在头部显示装置10上,以挡住50号灯光。通过右眼扭曲用户对真实世界周围的印象。以这种方式,用户可以通过左眼46号观察左侧的图像28 和周围,随时和舒适地观察左侧的图像28。微软指出,这一方法提高了用户检测左侧图象28是否与实际世界的相应实物物品相一致的能力。
如图3所示,当用用户的左眼看左眼46时,用户并不认为虚拟项目26出现在预期位置和深度。在提到的情况中,用户的左眼与左面虚拟相机36相对为46,因为用户的IPD大于默认的IPD。
眼睛对错误非常敏感头显示设备 10 的初始默认 IPD 与用户的真 IPD 之间稍有差异 。所有用户都知道,虚拟项目的位置和(或)深度与虚拟环境相比是错误的。如图2和图3所示,错误分别发生在两只眼系统和一只眼系统中。在增强现实环境中,用户可能非常注意到这个问题。
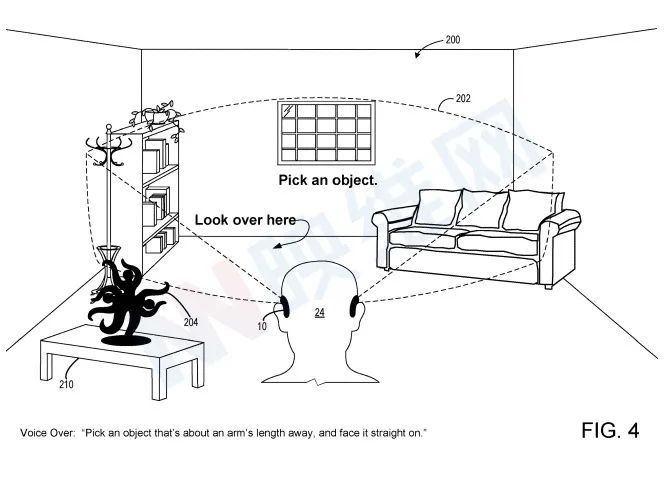
图4说明了微软公司提议的IPD距离估计机制,图4说明了用户在20024室使用头部显示装置的情况。
在一个示例中,头部显示设备 10 实时探测和(或)记录物理物体和其他物理属性的图片。可分析考虑中的照片。确定一种或多种适合用户IPD的物理物质。换句话说,可以通过头部显示设备10 探测到一个或多个物理物体。然后由头部显示设备10提供指示。该物品的区域和/或物体本身被引导到用户24。在图4的示例中,200室第204条可用头部显示装置10找到。箭头指向艺术204, 头部显示设备 10 可以显示文字, 如“ 看这里 ” 。因此,用户24接受视觉咨询。
用户 24 可以选择左侧。表210和接近第204条。图5说明了第204条的用户界面。用户可以通过使用头部显示设备10 捕捉艺术 204 图片来选择该图片 。可以指示用户使用头部显示装置10拍摄有形物品的照片。
在一个案例中,HUD10通过收集用户所选物品的照片来保护权力和资源。
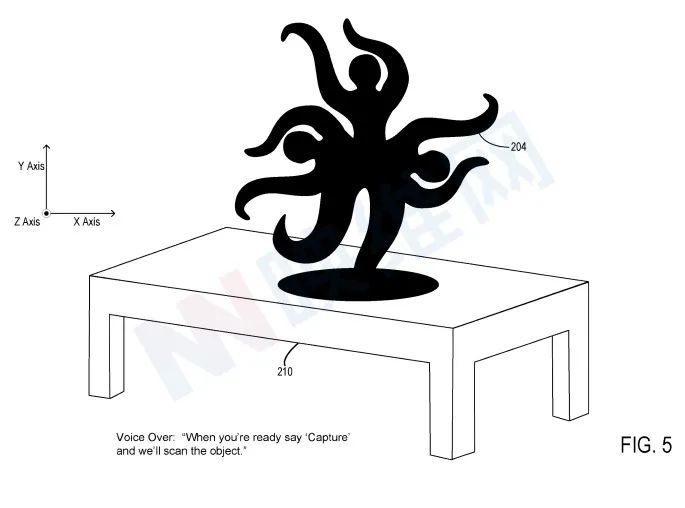
再次参考图5,用户 24 有能力指示头部显示 10 拍摄第 204 条的一个或多个照片。头部显示设备 10 可以持续图像或重新扫描指定的物理项 。还可以利用这一再扫描程序无限期地显示相关图像。以这种方式,目标程序期间发生的每件实物移动都可能被偏转。在一个示例中,其不断重新扫描和提供使用户能够瞄准非静态的便携式物品。
如前所述,头部显示设备10可设计成探测和(或)捕捉物理物品和其他物理特性的图片,头部显示设备10可编程用于利用上述数据确定适合计算用户的IDD的物理物体。
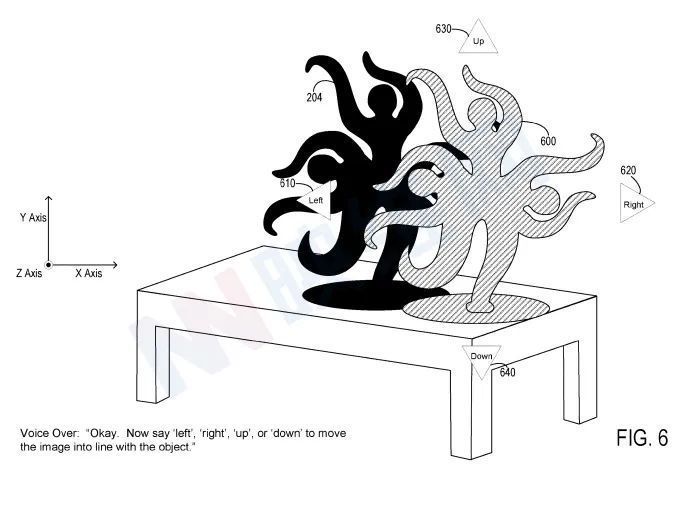
参考图6,头部显示设备 10 显示第 204 条的图像, 使用户能够检测出偏离第 204 条的图片 600 。根据默认视图矩阵的特性,您可以创建并显示600张照片的视图。例如,在虚拟世界中,视图矩阵的位置和方向。因此,因为默认视图矩阵属性可能不同于用户的真实眼睛特性,例如IPD,观众可能认为,与现实世界相比,图片600位于错误的地点或深度。结果,用户可以发现,照片600与第204条不符。
如图6所示,头部显示装置10可以告诉用户24提供用户专用输入,以便将图片600与艺术作品204相匹配。
在一个实施例中,一个或多个对齐图标或其他用户界面组件可以通过头显示设备 10 显示。图600的感知位置可由用户24使用部件来操纵。在图6的示例中,图片600, 四个图标显示旅行方向 : "左" 610, "右" 620, "上" 630, "下" 640。然后,用户 24 选择图片 600 的感知位置, 指向匹配图标 。例如,参照图7,用户 24 可以选择左图标 610 和右图标 630 。将图600的感知位置移到距离第204条更近的地方。
单击用户输入可能会改变默认视图矩阵的一个或多个方面,例如方向和位置。通过改变默认视图矩阵的方向和位置,同时向用户提供图像600视图,用户将发现图像位置的相关变化。
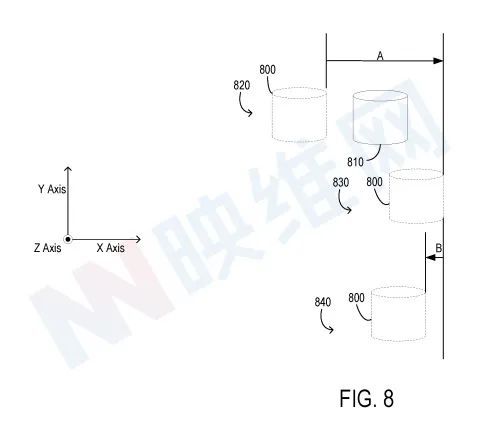
在一个实施例中,用户 24 可以为头部显示设备10提供第一个用户专用输入,与将图片800移动到右边的感知位置相对应。作为响应,图像800的感知位置可以通过头部显示设备10沿着X轴移动到A起始区域右侧。在这样的移动之后,据用户称,这幅图象似乎位于第一个更新的830位置。
随后,头部显示设备10可接收与图像800的感知位置相对应、朝相反方向或沿左侧X轴运行的后续用户输入。作为响应,头部显示设备 10 可以调整图像 800 的感知位置 在左侧, 低于起始距离的 B 次距离 。在这种移动之后,据用户称,图片似乎出现在第二个更新位置840上。
以这种方式,采用头部显示设备10 使用户24 能够微调800张照片的感知位置。例如,当用户 24 将图像800 的感知位置 移动到物理项目 810 的第一个方向,因此,用户24可以改变图片的位置。直到照片在运动的物理物体上方的第一个方向。
由于图像800与实际项目810之间的差异可能小于用户移动图像800之前的原始偏差,因此,当用户随后以另一种方式提供用户对用户的投入时,用户可以使用。弥补分歧所需的距离可能更短。因此,通过提供与B的后续距离 低于A的原始距离用户可以通过将图象向相反方向移动,降低B的后方距离,成功地微调800个图像的感知位置。
一种情况是,如果用户对用户的投入与以前的用户对用户的投入相反,图像800的距离可能低于以前的用户对用户的投入。
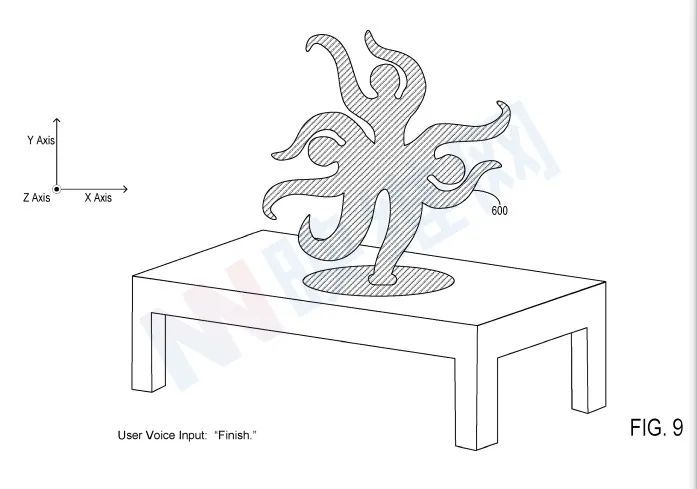
参考图9,当用户检测到图片600和艺术204的及时性时,无法看到图像。用户 24 可以为显示设备10 提供完整的用户输入。当头部显示设备 10 用于完成用户输入时,您可以从用户 24 中节省一个或多个对等输入实例。然后确定用户的IPD。
该程序可在用户的另一眼中重复。这使用户24能够接收与用户另一眼睛有关的一个或多个校准用户输入示例。使用对等反馈供用户使用。您可以确定用户的 IPD 。然后,它可能基于用户可配置的 IPD 校准头部显示。例如,检测到的用户 IPD 可用于校准与每个用户眼睛相关的视觉矩阵。
相关专利:
Microsoft Patent | Determining inter-pupillary distance
https://patent.nweon.com/23024
美国专利和商标局(USPTO)于2022年1月提交了题为“确定学生间所有权”的微软专利申请,并在该日之前公布。