
此外,由于无人驾驶录像路的提取工作自动化不良、道路信息不足以及道路过境点缺乏连通性等问题,道路进出不足。论文介绍了一种检索无人机照片的方法,连同拖吊结构和总体情况。采掘可以自动化,采用深入的学习方法,建立编码/编码模式。在网络模型中,为了收集更多的道路信息,已经建造了聚合特征模块和扩增体积模块。此外,政府还实施了一个高额损失机制,以保证道路相互连接。扭转结构性道路扩张特征的实现。实验结果表明,由于升级了网络模式,公路信息的提取效率更高。在马萨诸塞州,精确度、回调率、F1得分和匹配(IoU)的无人驾驶飞行器测试集分别达到89.47%、84.74%、86.86%和72.45%;在马萨诸塞州,对公共道路图像集的普遍测试中,精确度、回调率、F1得分和匹配(IoU)分别达到89.47%、84.74%、86.86%和72.45%。用于检索原始遥感照片的道路信息也运行良好。
关键词:地形学;全球环境;无人驾驶飞机;道路提取;聚合特性
0 引言
使用无人驾驶无人驾驶飞行器,开发无人驾驶飞行器和广泛使用技术无人机遥感开发在准确测量公路等表面附加物和恢复三维城市结构[1]等领域至关重要。目前,无人机录像正在用于提取地理空间道路信息,这是一个重要的研究问题。为了获得高分辨率遥感照片,人为解释道路的老办法耗时费力。对自动抽取方法的调查将有助于提高道路购置和更新的效率。
近年来,在通过供各种研究人员识别图像的卷卷神经网络[2,3]之后,在从遥感中提取图片信息时越来越多地采用深入学习方法[4-5]。文献中采用深入学习方法提取道路[6]。已经取得了积极成果。文献[7]首先以一个以神经网络卷为基础的、与公路区域像素相对应的遥感照片概率图作为起点。其次,为了平滑它,应用线性体积积累方法。我们可以以这种方式保存有关公路边际的信息。文献提出了地方和全球重点单元[8]。在广泛的网络基础上,还开发了一种新的道路采掘方法。该方法在从遥感照片中提取包括当地和全球信息的公路网络方面运作良好。根据文献[9],提出了一个新的协调体积模块。在原声上加上两个频道要保存水平和垂直像素数据,这使获得多层面空间数据成为可能。所有这些路线提取战略都侧重于发现更深层次的网络结构。相反,一个更强大的功能 来完成建筑分类。正在审议的网络模式的一个关键组成部分是全球背景认识模块。该模块从全球背景中获取背景语义信息,并将其纳入更复杂的剖面图的生成中。目前,U-Net模型[10]是语义分裂的最佳建筑之一。在编码器部分,U-Net模型使用两个体积层进行地物提取。一个典型的游泳池楼层被用来做测试。与这种方式相比,通过纳入快速机制,ResNet模式[11]增加了培训模式的层次。梯度损失得到有效防止,网络合并加快。在使用遥感照片从公路上提取信息时,许多研究已经建立了多尺度和多层次的特征,以便在图像和空间信息功能中使用像素。例如,PSPNet[12]利用空间金字塔模块收集多层特征作为背景资料。后来进行的其他研究利用数量扩大来扩大接受范围,以便收集背景信息。例如,Deeplabv2 [13] 扩展体积模块提供了多种增长率的组合。在不增加计算负荷的情况下,可以收集大量多尺度的背景资料。但是,现有基于背景的信息建模机制的公路采掘仍然有发展空间。换句话说,这些方法在提取视觉特征方面相当出色。不幸的是,确定关闭了哪条路线是具有挑战性的。此外,作为传统深入学习中的培训损失功能,经常使用交叉环球损失功能[14]。因此,在收集公路等曲线和尖端结构信息方面出现了孤立的损失。每个错误都会收到同样的后果。几何峰值元素的影响被忽视。另一方面,遥感照片中的公路信息像素占用率低,拖网结构很强[15]。可见的跨星体损失对道路分隔不理想。在模型训练过程中,由编码器编码的特征地图将包括额外的特征信息[16]。边界、质地和空间结构都是其中的一部分。然而由于编码过程中的荧光行动由于这种情况,一些语义信息将丢失。背景里甚至还有其他声音相比之下,未编码的特征图表含有更多的语义信息[17]。未编篡和编码的地物图片相结合,对地物位置和减少噪音十分有效。
因此,这项工作提供了一种技术,用以提取TGCA-Net无人机图象路以及拖车结构和总体环境认识。这一进程首先对具体的道路背景信息进行建模。结合地物编码和地物解码模块,创建全球环境认知网络培训模式。它是高维和低维道路数据的有益组合。现有更多的道路信息。此外,在本文中,在考虑到道路结构的情况下,适当提高了抽取拖船质量的结果。这反过来又提高了开采的准确性。
1 数据源与预处理
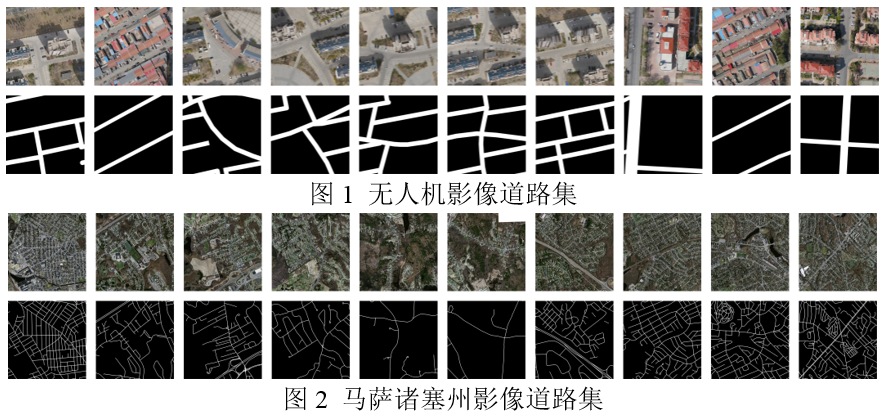
在这次调查中,使用了两套录像机。图1和图2说明了这一点。图1显示了无人机图像产生的一套道路。收集工作于今年11月举行。影片在天津市京津新城拍摄。无人机照片的原始分辨率为0.1米。它也有很多无人机拍摄的镜头 来扩大它的范围由于使用了大规模培训图片,这给计算机的性能带来额外的压力。训练阶段将更长。因此,将训练图像分割成 1 024 × 1 024 像素图像块 。对于每个培训图像,道路像素值为零。有些区域像素值为255。为每条道路创建实际的道路标签。总共收集了1 979幅培训照片和11幅经认证的图片,总共收集了1 979幅培训照片和11幅经认证的图像。图2显示了一套开放的马萨诸塞州图景公路。原始图片集的分辨率为 1500 像素乘以 1500 像素 。共有1,108张培训照片和14张经核实的图像。此外,为了避免模型在培训阶段过分适应某一区域的形象特征,在每个地点,原始照片和匹配标签图像随机排序,并保存在不同的文件中。
2 道路提取方法
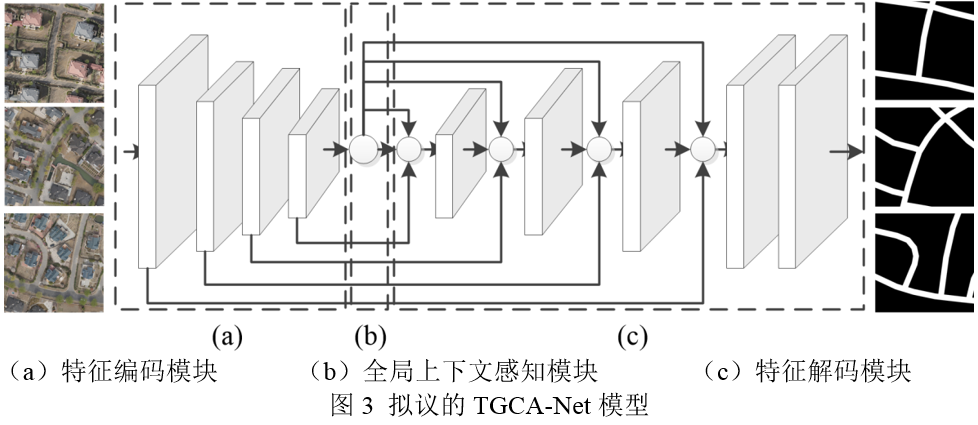
如图3所示,TGCA-Net模型的特征编码模块、全球环境认知模块和特征解码模块都是在无人机图像路径结构中单独界定的,如图3所示。 所提供的是培训期间使用的顶塔几何认知加权跨倍增损函数,以及关于其执行和评估指标的信息。
特点编码模块2
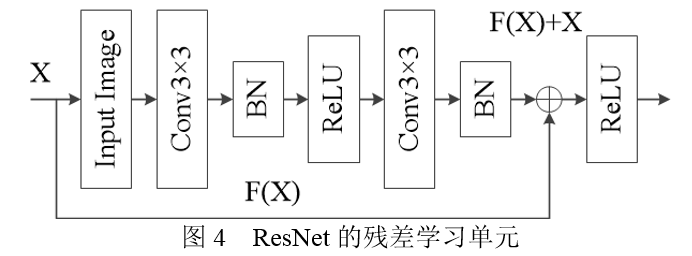
在本次工作中,作为主干,地物代码模块使用预先培训的ResNet代码。该方案保留了四个残疾学习单元。如图4所示,每个ResNet的残疾学习模块都包含在内。投入培训照片通过两个三、三、三卷层(Conv 3x3)处理。每个滚动层之后,将分批处理成一个单(BN)层和一个流体线性单位(RELU)活性层。最终,在地物代码之后,可获取更高档次的图片。
模块2:全球背景观
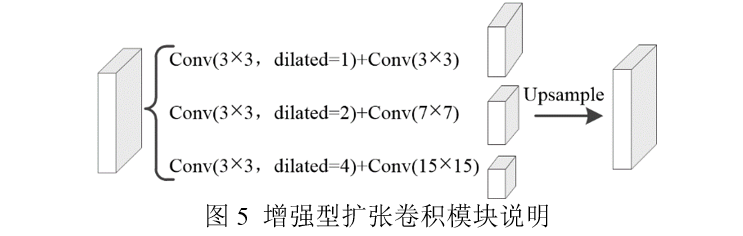
利用RésNet和PSPNet获得环境信息技术,找到解决问题的办法是可行的。本文引入了经改进的“扩大量模块”(强化放大校正版本),该模块基于“增强增长量”和“增强增长量”的概念。(EDCM)收集全球形势的信息。在该模块中,使用3个级联分支,每个分支将扩展量和多尺度量的结果合并在一起。每个分支整合的最终结果是一份高级别地物图。在理解全球环境知识的过程中,如图5所示,数量增长率(下降)从1增长到2,然后增长到4。也就是说,对于每个分支而言,3x3、7x7、15x15的感官是3x3、7x7、15x15。Conv的同等使用大小分别为3、7和15卷。然后使用双线插件法对低维特征图(Uppsample)进行取样。折叠集成以获取与输入特性映射相同大小的特性 。通过分析各种大小物体的属性,这提高了该网络提取特征的能力。
第2单元
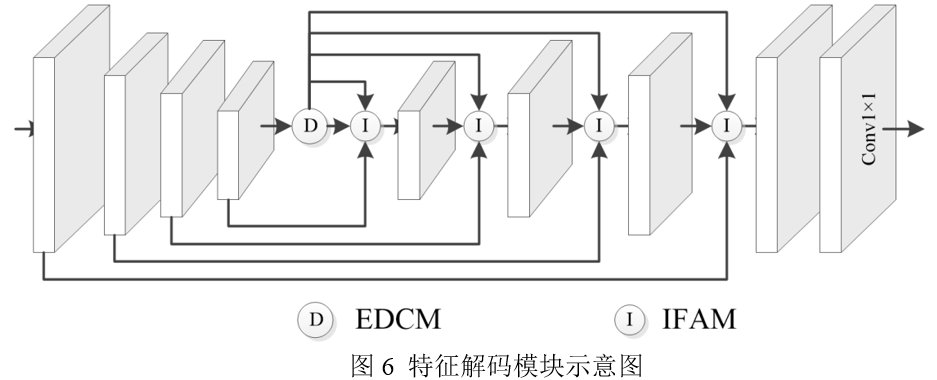
在经过改进的扩展量模块完成后,这将提高信息的可见度。这有助于从全球角度推断许多重要目标之间的相互关系。因此,在特征解码模块中,创建了聚合特征模块(IFAM)。三个层次的特征是结合的。如图6所示,农联由三个投入部分组成。为了获得同样水平的产出,使用其中一种特性。这一输入结构与U-Net跳跃连接结构相似。向农联直接提供未编码的特征描述;第二部分在编码后接受特征描述。第三阶段获得EDCM编写的背景资料简介。在令人满意地收到地物图的三部分之后,首先,填写第一部分,以便利用全球平均共享生成权重。第二部分提交的地物图将乘以形成新的地物图。接下来,为了构建新的重量,使用全球平均人才库绘制了新的地物图。第二部分所输入的描述再次乘以。最后,为了作为农联的输出结果图,将新的特征图与特征图的第一部分结合起来。继连续三次联合会会议之后,最后一层是1x1伏。作为输出,使用 S 形激活功能来构建与输入图片大小相等的二元面罩。
感知损失功能
这里介绍的框架是代码编码模式的全面学习机制。新的损失功能取代了这一功能,它包括了对加权跨烷损失[18] 的上下方几何认识。因此,将几何边界平滑性纳入深层、完全挥发的网络研究中。活动将是根据跨kane损失功能执行罚款项目。如公式(1)(3)所示。
2.5 实施细节和评估指标
本研究利用SGD势头培训拟议的TGCA-Net模式。培训的硬件装置是NVIDIA GEFORce GTX160 Ti GPU。这个程序是在Windows操作系统中为PyTorrch环境设置的。在试验中确定了下列超参数:开始学习率为0.001、001、001、001、001、001、001、001、001、001、001、001、001、001、001、001、001、001、001、001、001、001、001、001、001、001、001、001、001、001、001、001、001、001、001、001、001、001、001、001、001、001、001、001、001、001、001、001。动量为0.9,一. 将Tungsten Lose 函数设为 0 值。为了定量比较结果,使用模型的评估指标(4)-(7),准确性、召回率、F1分和匹配(IOU),按此顺序排列。
3 实验结果与分析
三.1 道路采掘成果
无法利用这一方法来核查它是否为道路分割带来优异的结果。U-Net、FCNs和D-LinkNet[19] 网络被用来分割数据集。将训练好的模型,与同一经核实的数据收集比较同时,在评估模型的影响时,确认数据浓度是否包括曲线路段部件,是这一图形比较的基础。核查照片,包括直接直线道路特征,如预测数据集1。预测数据集2是识别带有弯曲道路特征的照片。
图7描绘了预测数据集1的原始照片以及标记图像、使用FCNs的分裂结果、使用D-LinkNet的分裂结果、使用U-Net的分割结果以及使用这一技术的分割结果。然后将结果与原始照片进行比较。在预测数据集1中,道路往往以直线或跨线的方式分布。道路周围有各种特征,道路周围有各种特征。突出较明显。道路中只有几个障碍。在这种情况下,与FCNs模式相比,D-LinkNet、U-Net和这一技术展示了更好的道路分隔。但是,图7红色圆圈内的比较表明,该国人口众多。D-LinkNet和U-Net版本在一些路口有骨折。通过查看匹配的原始图片部分, 您可以它位于这些道路的交叉路由。也就是说,分裂的碎片是不会隐藏起来的。相比之下,本文件的方法基于对全球形势的看法。这是我国历史上第一次能够改变道路状况。在同一培训环境中,公路连接的绩效有所改善。
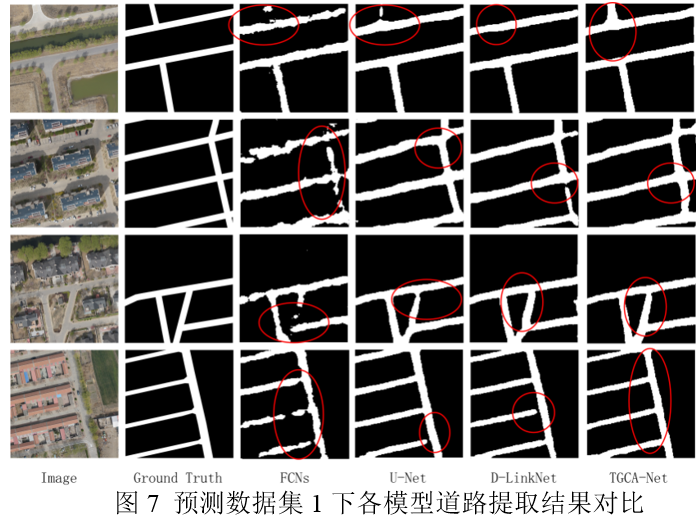
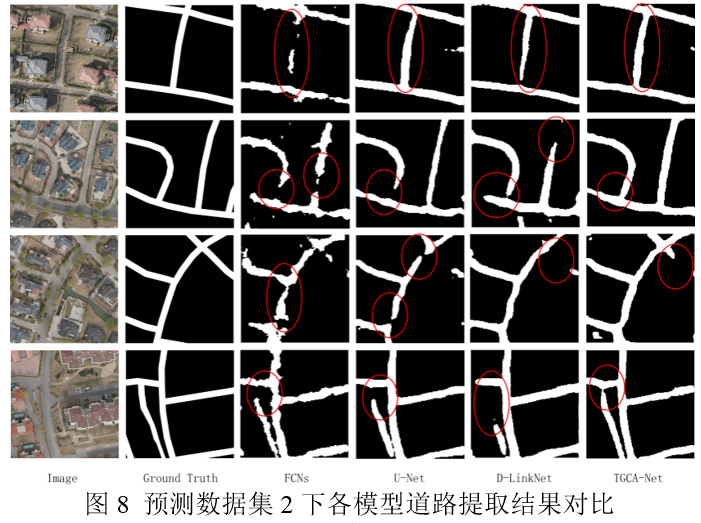
图8显示了原始照片、标记图像、FCNs的分解结果、D-LinkNet的分解结果、U-Net的分解结果以及这一技术的分解结果。然后将结果与原始照片进行比较。在预测数据集2中,道路结构很复杂有更多的曲线道路,例如,公路沿线的建筑已变得更加多样化。有些道路被完全覆盖了在这种情况下,在相同的培训环境下,不宜采用友好网络网络模型来获取成果。同样的,图8红色圈内显示,无论是基于D-LinkNet还是基于U-Net架构,这并非一回事。路交叉路口的中断在同样训练环境的复杂环境中继续发生。此外,在交通过境点看到几张原始照片时,树木阻拦了这些照片。在这里分裂道路的结果同样也是一次突破。相比之下,这项研究中描述的战略改善了分解路线的方式。作为路线一部分的公路段也大致分开。
2.2 比较定量分析
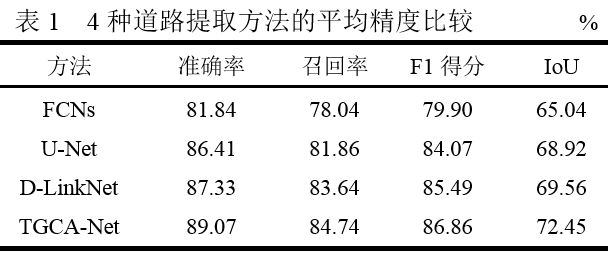
分析分裂的结果时要更直观一点采用上述评价标准衡量分离模型的评估结果。表1显示基于评估标准的各种网络结构的结果。可以看出,在自制无人机测试组中,该研究中报告的TGCA-Net模型的精确度、召回率、F1得分和IoU得分达到89.47%、84%.74%、86.86%和75%。其中,国际公路货运联盟比其他道路分割网络的公路分割网高出7.41个百分点。其表现比U-Net和D-LinkNet高出3个百分点以上。F1得分是F1得分的六倍,比FCNs.96%高出6倍。与U-Net相比,增长78%。这与D-LinkNet的11%相比。对这四项指标的定量分析表明:升级后的TGCA-Net模型提高了无人遥感道路数据提取的准确性。造成这种情况的主要原因是将公路的拖车结构混合在一起。这是改善正在修建的道路的唯一途径。现有更多的道路信息。进而提高准确率。
三. 三种不同模型的基因测试
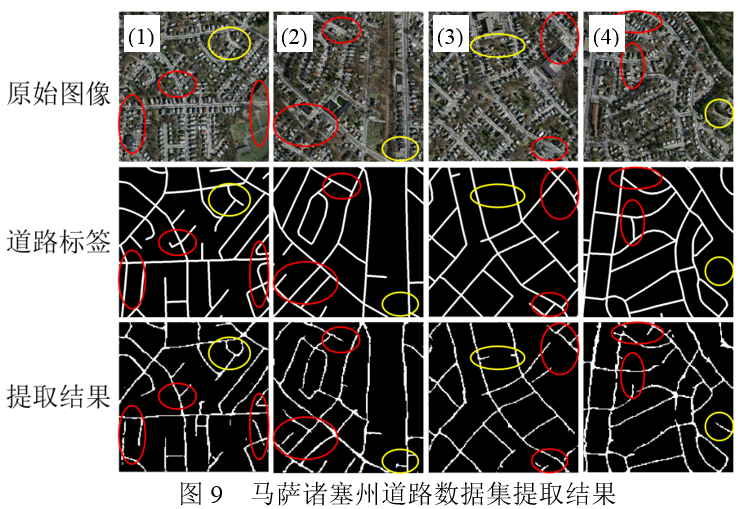
经过数量比较,TGCA-Net模型使用自制无人驾驶飞机图象路段,在这项工作中表现更好。为了进一步确认TGCA-Net模型的兼容性,马萨诸塞州公路图片集被用于培训和测试这些照片。原始数据集先对图像进行映射。共收集了9 945张训练照片,有500×500像素分辨率。通过使用培训模式和实验,图9说明了对结果的验证。可以研究一个道路框架,根据这一框架,从马萨诸塞州的道路数据集中中产生原始遥感照片。图9红色圈显示,取回的照片中丢失了几条道路。然而,照片中的大部分道路已被拆除。在主要高速公路上的提取 是非常惊人的。标签具有高度的一致性。此外,图中黄色圈显示,这里提供的模式对未贴标签的小路有影响。
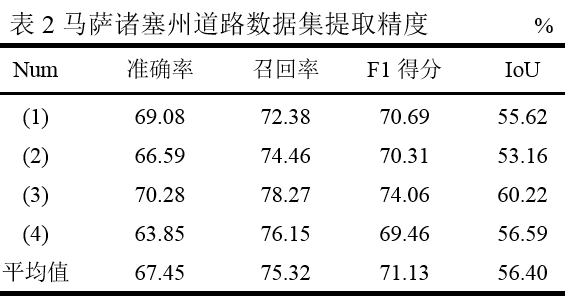
另外,为衡量本文件给出的马萨诸塞州道路数据集中模型的有效性,表2显示评估指标。可以看出,目前的研究显示,该模型实现了马萨诸塞州道路测试的中央平均准确率、召回率、F1分和IOU 67分,分别为45%、75.32%、71.13%和40%。报告表明,本研究报告提供的模式具有良好的道路自动拆解能力。因此,公路采掘任务具有高度的普遍性。
4 结束语
无人驾驶飞机广泛使用遥感技术,以及有必要提供关于地理空间道路特征的信息,难以自动和可靠地提取公路曲线和复杂的补充结构数据。计划利用遥感照片自动获取道路信息。该技术是围绕着升级后的TGCA-Net模型建造的。结合自上而下的结构和材料的总体背景,这是开展工作的方法。公路信息可从无人驾驶飞机捕获的高分辨率遥感照片中自动检索。
还比较了用于检索道路信息的现有在线模式。结果表明,根据最新培训模式,现在有更多的道路信息。对于复杂的道路采掘假想,可以纳入一个补充结构观点。它不是这样做的唯一方法;它不是这样做的唯一方法;它是这样做的方法;它是做到这一点的方法;它是做到这一点的方式;它是做到这一点的方式;它是做到这一点的方式;它是做到这一点的方式;它是做到这一点的方式;它是做到这一点的方式;它是做到这一点的方式;它是做到这一点的方法;它是做到这一点的方法;它是做到这一点的方法;它是做到这一点的方法;它是做到这一点的方法;它是做到这一点的方法;它是做到这一点的方法;它是做到这一点的方法;它是做到这一点的方式;它是做到这一点;它是做到这一点的方式;它是做到这一点的方式;它是做到这一点的方式;它是做到这一点的方式;它是做到这一点的方式;它是做到这一点的方式;它是做到这一点的方式;它是做到这一点的方法;它是做到这一点的方法;它是做到这一点的方法;它是做到这一点的方法;它是做到这一点的方法;它是做到这一点的方法;它是做到这一点的方法;它是做到这一点;它是做到这一点的方法;它是做到这一点; 它是做到这一点的方法; 它是做到这一点的方法; 它是做到这一点的方法; 它是这样做的方法; 它是这样做的方式; 它是道路日益相互连接。定量分析结果表明,网络模型的准确性、召回率、F1得分和无人驾驶飞行器测试集的IOU分别为89.47%、84%.74%、86.86%和72.我不知道,分别是45%。与其他指标相比,网络示范指标的数量显著增加。回到主干道上是个不错的方法此外,在马萨诸塞州广泛测试公路图象集也是在年底之前的时间问题。原始的遥感照片路框基本上是提取出来的。平均准确率、召回率、F1分和IOU分别为67.45%、75.32%、71.13%和40%。挖掘道路的巨大潜力已经证明。然而,由于各种道路种类和宽度的碰撞,若干道路信息调查结果仍然不一致。因此,下一次研究的重点是算法优化和使用各种平台的数据来源。以实现更好的应用。
Wang Xiaojun(1993年至今),男性,山西金正,遥感技术应用和无人遥感数据处理应用硕士,系作者的介绍。
王晓军 叶浩平 廖宏 冬天 振兴
北京中国科学院地理科学与资源研究所资源和环境信息系统国家重点实验室100101;
杨江大学地球科学学院,武汉,430100;
天津无人驾驶航空器应用研究所,天津301 800;
四. 中国科学院UATM研究中心,北京100101
- END -