
文章目录
- 一,做一个自由的独立模型
- 二. 深入了解坐标和坐标组装。
一,做一个自由的独立模型
简单的单体是最基本的机械系统,它们需要开发两个部分,一个部分有一个固定的幻灯片块,一个部分有两个部分,一个部分与一个旋转联合体连接。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-8dI0mrGk-1647610070165)(F:A_Pro_Files博客Simscape Multibody系列教程单摆.png)]](/dataimg/allimg/20220319/98f70a4005483b09239df1f57a6d0135.png)
我们希望建立一个自足的制度,其最终结果如下:
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-s9YhJr2m-1647610070166)(F:A_Pro_Files博客Simscape Multibody系列教程MATLAB_BCuTHXIUgJ.gif)]](/dataimg/allimg/20220319/cd51551a059b6457647a156fe842676c.png)
利用上一节各部分。
新部件的订单。
复制我们创建的面具的最后一块, 然后复制面具到一个叫做钟摆和六张幻灯片的文件夹。
增加旋转关节,拖动一个Revolute Joint模块进来,位置在Simscape>Multibody>Joints,把他们连接起来。这样就实现了装配过程。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-NxE7hPi3-1647610070166)(F:A_Pro_Files博客Simscape Multibody系列教程MATLAB_GdC9ant7ta.png)]](/dataimg/allimg/20220319/54a7297953cb9f3ac646278fb8c67059.png)
更改交叉滑动幻灯片和钟摆的颜色和大小 。
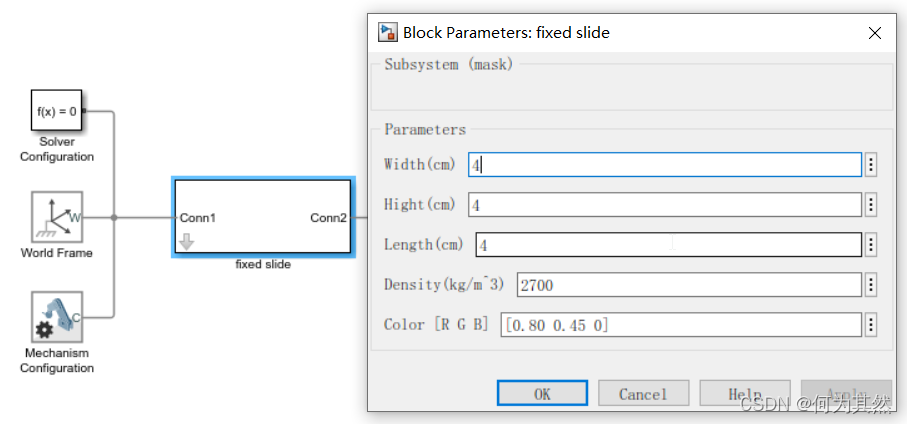
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-qPGJ5LfN-1647610070167)(F:A_Pro_Files博客Simscape Multibody系列教程MATLAB_0P97kX5UeV.png)]](/dataimg/allimg/20220319/93fb5c8d3d59ba7665db7123ac1e5151.png)
例如,将联合点的初始角度改变为 30 度。 这是想要在文章中创建第一个图像的人 。
运行,看看结果。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-8SCR8Lnd-1647610070167)(F:A_Pro_Files博客Simscape Multibody系列教程MATLAB_hPfsf9lCUQ.png)]](/dataimg/allimg/20220319/bf37789d6ef62103331b2076da62f380.png)
比如说,30度的设计效果是 使这个页面的最初图像看起来 朝着错误的方向移动?
请点击Revolute Joet的 B 和 F 调阅。分别如下图所示。FFPentluum B 是F连接 由倒流联合。因此,修订联合股的B和F分别与六分制幻灯片和Pentulum(就在拐角处)保持一致。建议多读几遍),然而, 逆流的Joet打算 向Z轴移动。之所以产生这种效果,是因为将固定幻灯片和Pentulum这两个部分的Z轴调高。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Kso61PAi-1647610070167)(F:A_Pro_Files博客Simscape Multibody系列教程MATLAB_Hyl8DxowBp.png)]](/dataimg/allimg/20220319/c3059dc7c53f5a84080e5ed9f98c1c72.png)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-vp0yzPIc-1647610070168)(F:A_Pro_Files博客Simscape Multibody系列教程MATLAB_GXaSibWV3Q.png)]](/dataimg/allimg/20220319/d93205eabc724f71c4005ee46e64f278.png)
修改坐标系。
地理坐标系统位于地图左下角。我们真正想要的是 彭杜伦和固定滑轮 遵循地理坐标系统的Y轴以这种方式获得行动自由是可能的。因此,我们必须改变坐标。Pentulum B的F型固定幻灯片移动到一个地理轴。
单击交叉滑动,然后硬点击“块”标签以访问该掩码进行编辑。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-H0TYbEdJ-1647610070168)(F:A_Pro_Files博客Simscape Multibody系列教程MATLAB_u1xQpys2uM.png)]](/dataimg/allimg/20220319/0e49aac4aec50e1819a136e0fc9536a4.png)
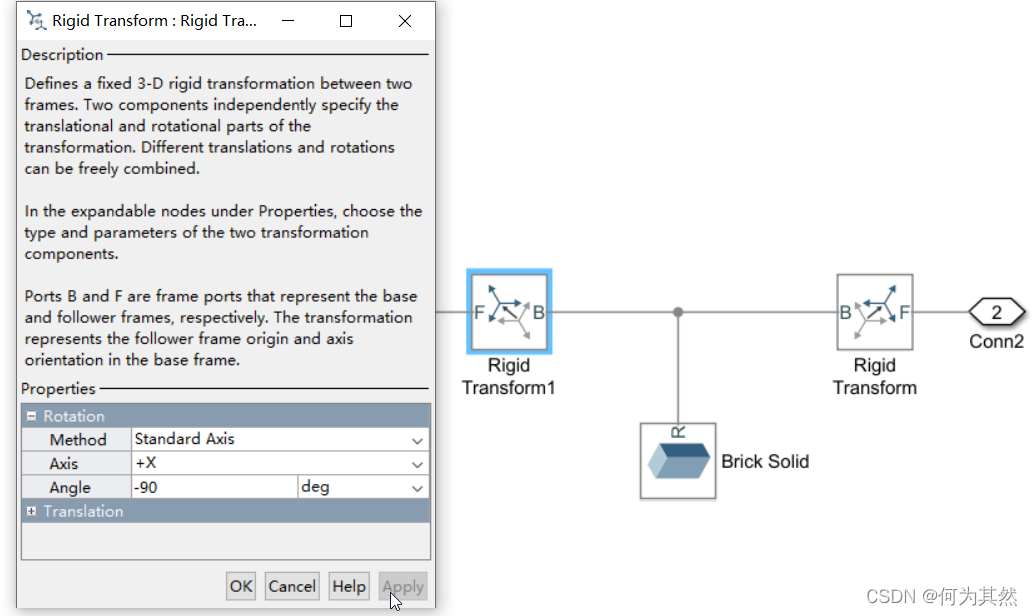
为添加坐标旋转,请点击 Rigid 变换( 自动坐标系统) 。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-BN226BUG-1647610070168)(F:A_Pro_Files博客Simscape Multibody系列教程MATLAB_6K62NlLibU.png)]](/dataimg/allimg/20220319/8d0e14e348caa4803ac9024530042f80.png)
钟表1(标题系统)的僵硬变形同步变化
重新运行它, 结果如下。 这次, 地图的坐标是“ 旋转联合 F ”, 可以看到, 单个钟摆沿旋转联合 Z 轴旋转 。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-n7ZUBtDg-1647610070169)(F:A_Pro_Files博客Simscape Multibody系列教程MATLAB_7HwrNATlhu.gif)]](/dataimg/allimg/20220319/09c62398b60f376b5a7a5448fbf2d533.png)
二. 深入了解坐标和坐标组装。
在修正过程之后,你需要稍微了解一下集会,以及我们如何通过坐标(即集会)建立各块(即集会)的联系和约束性关系:
第一步是将两个协调系统的初步要点结合起来。
第二步,建立约束。
如果上述固定幻灯片的F与钟摆的B直接相关,则两个是三个坐标的初始重叠和对齐,即固定连接。
如果在中间插入一个联合,那么自由就会得到加强,例如,我们在上面放置的旋转接头就会增强自由,所实现的结果是,六张幻灯片的F和钟摆的B对齐,Z轴对齐,x轴和y轴可以旋转。
革命联合和移动联合部队是Matlab使用最广泛的两个联合部队。
Matlab的倒流Joet预计将围绕 z 轴, Matlab的倒流联合计划预计将围绕 z 轴旋转, 而Matlab 的顺流联合计划预计将围绕 z 轴旋转, Matlab 的倒流联合计划亦会围绕 z 轴旋转。
在Matlab的Primatic United 在 z 轴周围默认移动, 在 Matlab 的 Revolute Joet 在 z 轴周围移动, 在 Matlab 的 Revolute Joet 在 z 轴周围移动, 在 Matlab 的 Revolute United 在 z 轴周围移动。
因此,在建模中,你必须把这两个部分 转到其他方法的系统 Z 轴, 转到理想的旋转轴, 否则你就会转向错误的方向 。
PS:这和Matlab的有点不同, 因为我在我的博客上做了一个彻底的重建, 从我所收集的资料来看, 它告诉每个人,包括我自己, 放弃所有的课程, 自己做。