
我们将学习如何在这个程序中使用 Opencv 和 Python 跟踪对象。
首先,必须理解目标测试和目标跟踪之间的区别:
- 一. 目标测试需要检测每个框架。
- 2个物体跟踪将沿整个框架跟踪该物体,但将保存该物体位置的历史记录。
我们先从实验品测试开始 然后继续使用物体跟踪测试
1. 潜在应用有哪些?
可能存在多种用途,例如计算特定区域的个人人数,计算通过传送带运输的物品数量,或计算高速公路上的汽车数量。
当然,当你看这门课程时, 很容易相信 数百个概念可以应用到现实生活中 或者产业中。
2.我们需要什么?
我们将在本课程中使用三个文件:
highway.mp4高速公路录像将用来统计汽车数量。tracker.py已经完成了,下载就可以轻易得到它main.py主函数
3.物体检测
起初我们必须打开高速公路.mp4文件,
我们利用了它,正如你从样本代码中看到的那样。createBackgroundSubtractorMOG2函数,该函数返回背景比率(背景比例),然后mask。
mask可视化结果: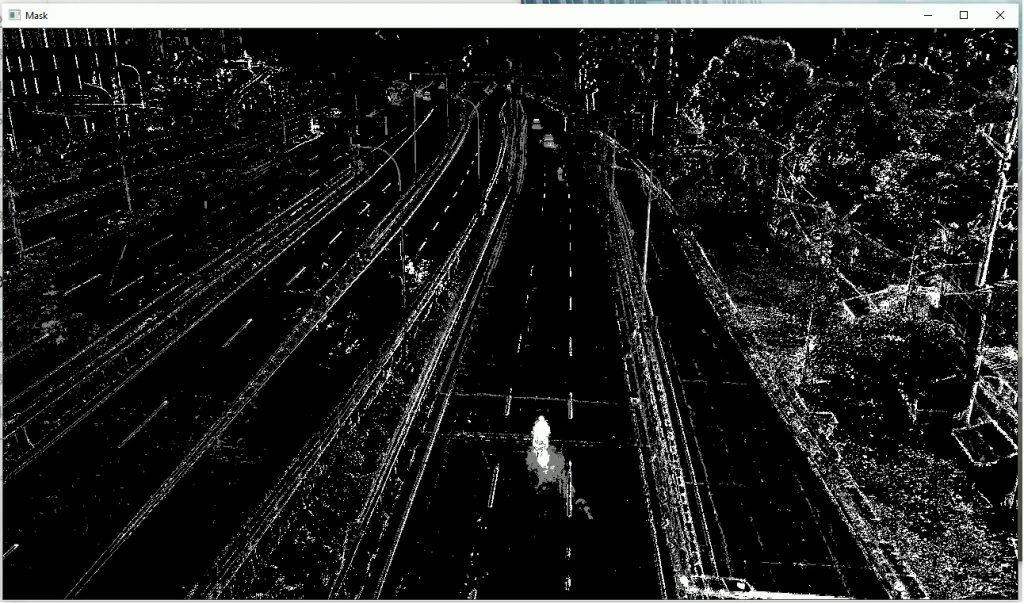
但是,如你所见,图像中有许多噪音。让我们通过删除所有微小的碎片和专注于大于一个区域的东西来增强提取。
使用 OpenCV。cv2.drawContours我们之所以能取得这一结果,是因为函数引出轮廓。
四,我们定义了一个研究领域。
整个窗口的研究与目前的课程无关,我们只有兴趣计算所有乘车地点的车辆,因此我们必须确定一个感兴趣的区域,并在该地区使用。mask。
结果可视化如下: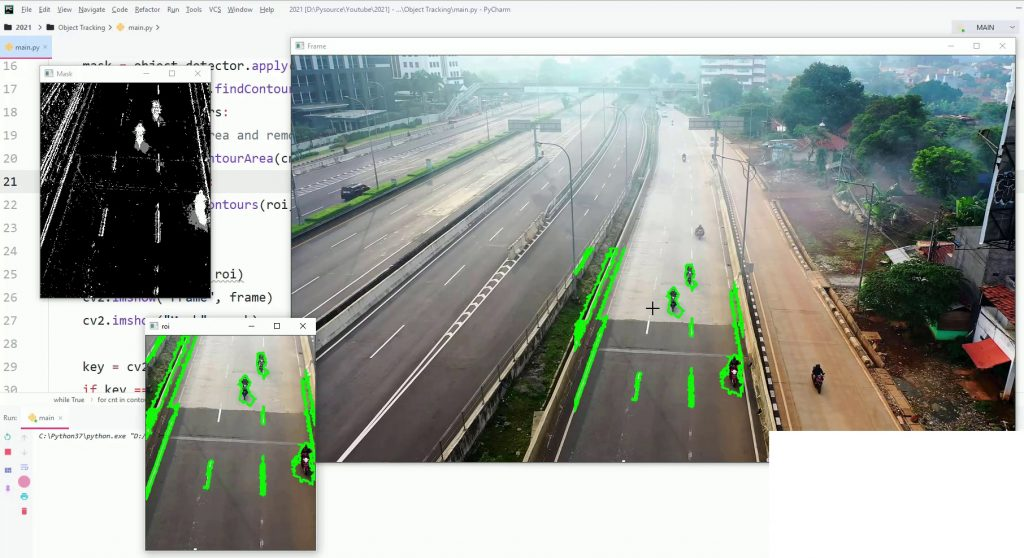
函数cv2.createBackgroundSubtractorMOG2一开始它就被包括在内了,没有界定任何参数, 现在我们看看我们怎样才能提高我们的成果。history是初始参数,在此示例中该参数被设为100,因为相机是固定的。varThreshold修改为 40, 因为值越低, 误差的危险就越大。 在这种情况下, 我们只对更多的受众感兴趣 。
五,在物品周围画个盒子
在开始矩形之前,我们清理了更多照片。因此,阈值功能是有益的。mask我们首先告诉它,我们只想看到白或黑的价值观,因此说:254, 255只考虑254至255之间的数值。
然后在条件和矩形绘制时插入所查明项目的坐标。
这是最终结果: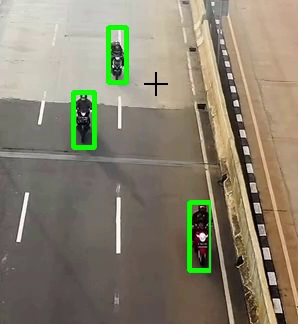
6.对象追踪
现在我们需要做的就是输入和整合追踪功能。
物体产生后,我们必须将边框的每个位置都输入一个阵列。
通过在屏幕上展示结果, 您可以观察所有ROI频道是如何被检测到的, 以及如何将其位置输入特定的阵列 。 显然, 我们发现越多的摩托车, 我们的阵列就越大 。
第七,给一个项目指定一个独特的标识。
现在让我们通过包含位置的阵列tracker.update()我们将再次获得一系列地点, 但这次我们将给每个物品一个独特的身份证明。
正如代码所示,我们可以使用所有内容的循环分析。我们需要做的就是画一个矩形并显示车辆标识。
图表对结果进行了描述。
8.完整代码
tracker.py
main.py
结论
从影片中可以看出,我们实现了我们在学院开始时为自己确定的目标。
但是,你应该把它看作是一个实践或起点, 因为在这个问题上有很多话要说, 而这个课程的目的 只是为了让你们了解物体追踪的基本原理。
如果你想将Object Tracking在您的项目中,您应当使用更加可靠和复杂的物体测试方法以及跟踪方法。
完整代码地址:
亲爱的,我不知道你在说什么,这篇文章是我们特别报导全球之声网路:com/s/1smt4hwD8Z8dN977gLjYhA的一部分。
提取码:123a
参考目录
https://pysource.com/2021/01/28/object-tracking-with-opencv-and-python/