系列文章目录
ROS2和 windows intro Tutorial - 安装ROS2foxy在窗口
Ros2和Windows输入指令-控制小龟
罗斯2和窗口介绍课程-听录音和出版主题
ROS2和窗口介绍课程-编译ROS2软件包
ROS2和窗口介绍 Tutorial - ROS2导航导航2
Ros2和Windows输入指令-修改域名 Domain_ID
ros2与windows入门教程-控制walking机器人移动
Ros2和Windows输入教程-创建工作空间和功能包
Ros2和Windows输入教程-使用rviz2
Ros2和Windows输入指令 - Slam_toolbox算法构建
Ros2和窗口介绍课程-集成图形和导航
说明:
- 介绍如何在windows ROS2上控制小乌龟
步骤:
- 使用调用命令设置环境打开新cmd命令提示窗口
- 打开小乌龟示例
- 如果小乌龟成功启动,终端将显示以下内容
- 然后使用调用命令设置环境打开cmd命令提示窗口
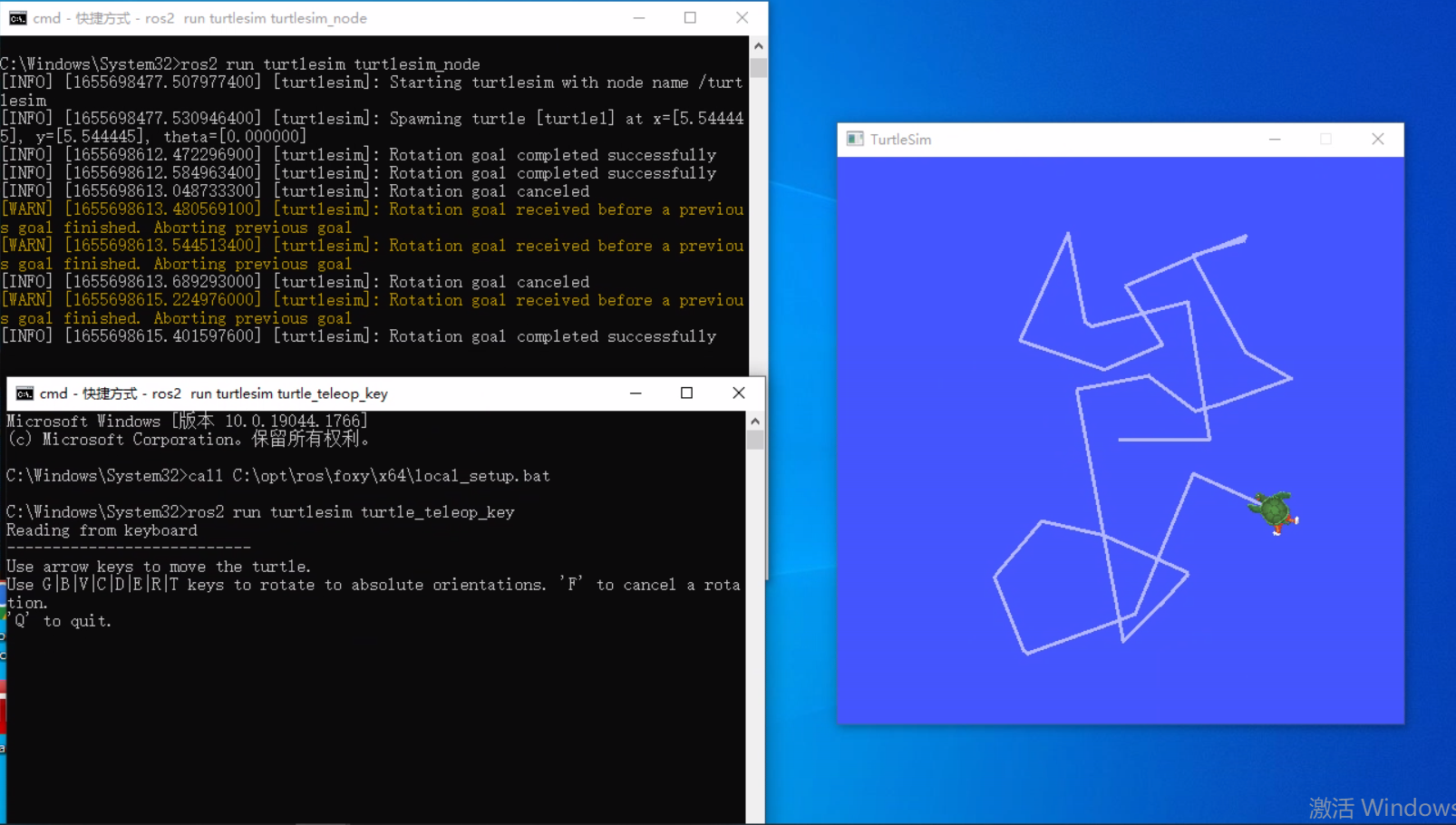
- 键盘控制
- 如果文件成功启动,端口将显示以下
- 分别按 ↑ 、↓ 、← 、→ 键进行控制机器人,分别按G 、 B 、 V 、 C 、 D 、 E 、R 、T键进行控制机器人转到特定方向