
文章目录
- 1. 点云边界框
- 二. 阴角公牛
- 三组DBSCAN
- 四. 分割RANSAC飞机
- 五. 消除隐藏点
本文将覆盖 Open3d 如何处理云的边框、对流、 DBSCAN、 RNSCA 和隐藏的清除 。 这是前一篇文章的继续, 是 Open3d 云处理器的改良版本 。
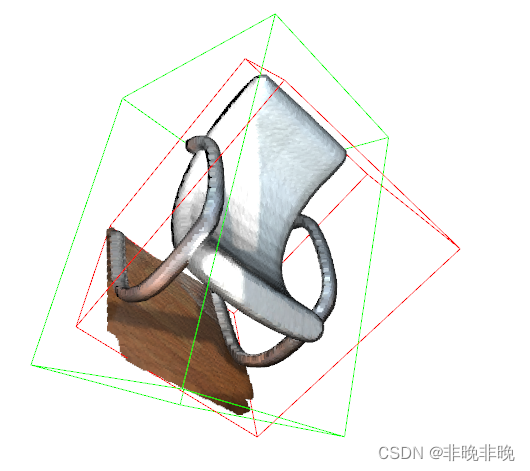
1. 点云边界框
环绕盒,像其他形式的云几何形状一样,存在。此时,打开3d 提供两个周边框架界面。AxisAlignedBoundingBox和OrientedBoundingBox与下表所示不同,还可以用于三角几何。
| 函数 | 名称 | 说明 | 图形说明 |
|---|---|---|---|
| AxisAlignedBoundingBox | 轴心对接边界框架abbaa | 每条边都有平行的轴 |  |
| OrientedBoundingBox | 定向边界框obb | 边和轴有一定的夹角 |
 |
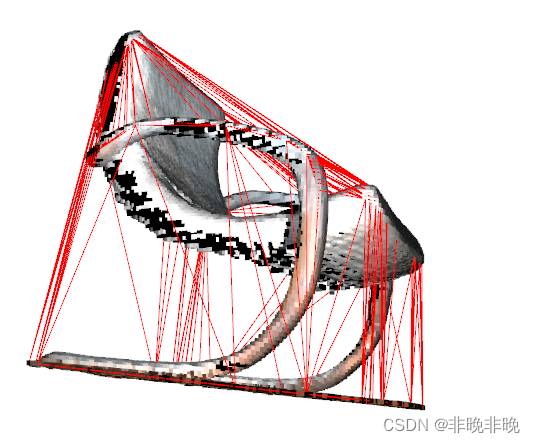
二. 阴角公牛
点云是最小的点,计算点的机制是使用打开的3d实现的。compute_convex_hull
该接口基于 Qhull 执行 。
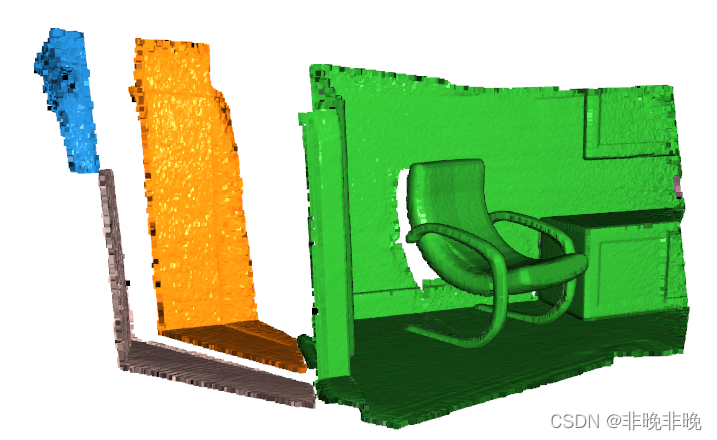
三组DBSCAN
DBSCAN[1996年]方法是一种基于密度的集群算法,由Open3d完成,程序需要两个参数。
- 入参:
- 使用 eps 定义组群
相邻点云的距离- 最小点 : 指定构建集所需的最小点数 。
最小点数。
- 出参:
此函数产生带有标签-1代表噪音的标签 。
输出:
四. 分割RANSAC飞机
Open3D还支持RANSAC分区法,这种方法使用分区平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面平面
- 承认的最大距离阈值:
- Ranac_n:随机抽样飞机点数。
- num_ interations: 最小的重叠次数 。
输出:

五. 消除隐藏点
注意云解问题, 如果您只想查看前景点, 您必须首先过滤背景点 。 要做到这一点, 我们可以使用隐藏点清除技术 。
这是从不同角度展示视觉云的方式。。
输出:
原始视角下的视图: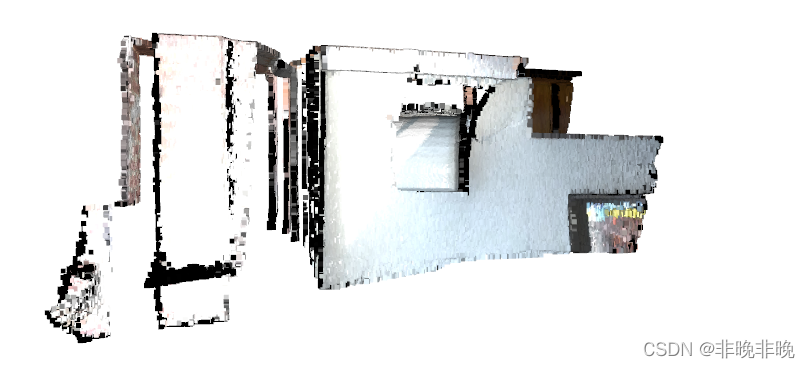
ưμ㼯A