
文章目录
- 安装巴克斯特环境设施
- 硬件准备
- Ubuntu16. 环境04装置
- 制作U启动盘
- 分配磁盘
- 安装Ubuntu
- 错误及其解决办法
- ROS环境准备
- 安装过程
- 常见的错误及其固定
- 安装BaxterSDK。。
- 安装巴克斯特模拟环境
- 安装Gazebo
- 安装Rviz
安装巴克斯特环境设施
硬件准备
- 一个至少有4G大小的闪存盘,最好是一个巨大的4G闪存盘,可能会造成资源浪费(闪存盘将格式化)。
- 一本剧本或一台带有机械硬盘的电脑。1
Ubuntu16. 环境04装置
制作U启动盘
- Ubuntu16 是在网上发现的。它是 04 系统的一个镜像(当然,你可以通过搜索镜像安装不同的系统)。
- 选择正确的写作程序很重要 鲁弗斯在这里很方便
- 插入简易闪存驱动器,启动编稿程序,并导入简易系统镜像。
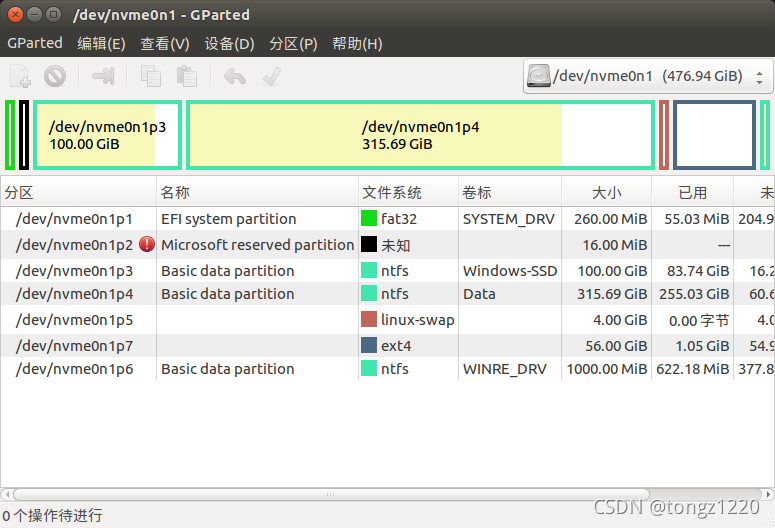
分配磁盘
- 进入电脑磁盘管理,这是空间中首次出现至少60G的差距。这里我分了60G,在安装过程中,它进一步分为4G和56G部分。其中分区5,Linux的系统磁盘被称为4G分区。Linux的数据盘是另一个。Windows无法进入这两个车牌。
[外国链图象传送失败;发端站可能有一个隐形链机制;照片应当保存,以便直接上传(img-1OM3rFT-16166868774)(C: Users86156AppDataRoamingTyporatopora-user-imagesimage-202020201082042042235066)。 [Png, png, png, png, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng)
安装Ubuntu
- 插入新生成的 U 启动器。 将机器恢复到 BIOS 模式 。
- On Linux, 前往配置, 并将存储模式设置为 AHCI 。
[外国连锁照片传送失败;发端站可能有一个反海盗链系统;图像应保存下来,供直接上载(img-e5UBRJW-161661868775)(档案://D:APPQ1297878915ImageC2CED3D2D29D29F8997D831761E7CED94A239F.]jpg)]
[外国链图象传送失败;发端站可能有一个隐形链机制;建议为直接上载保存照片(img-s QhmIC04-1616618676)(档案:D:APQ1297878915ImageC2CD5B9B0C8BA552CE557579AB6)jpg)
- 将系统启动顺序更改为 BOT 中的 U - disk 启动程序, 以便计算机可以进入 U - disk 系统 。
[外国连锁照片传送失败;来源站可能有一个反海盗链系统;图像应保存下来,供直接上载(IMg-BFlzb3Mf-16166188676)(档案:/D:APPQ1297878915ImageC2074930E06C5E8D242C005F5B0DBA17A17A.jpg)]
- 新的启动安全变更通常是封闭式系统保护,以便能够进入驱动系统,各种计算机可在网上获得。
- 如果出现黑屏,请输入退出并重新选择启动模式。不,只需跳过它即可。
[外国连锁照片传送失败;发端站可能有一个反海盗链系统;图像应储存供直接上载(img-knk DizoA-16416618688377),(档案:D:APPQ1297878915ImageC2-ED227DC3AE61CF20AF1445FFB7DA3C.jpg)]
[外国连锁照片传送失败;发端站可能有一个隐形链机制;照片应储存供直接上载(IMg-5vBh1lMU-1616618688377),(档案:/D:APPQ1297878915ImageC2C5A05D7D2D2F9D0F00BD69FA5B66F86D85CD79.jpg)]
- 进入Ubuntu
[外国连锁照片传送失败;发端站可能有一个隐形链机制;照片应保存下来,供直接上载(IMg-EIX8Abcd-164166186878),(档案:/D:APPQ1297878915ImagiageC2CD22615A81D8D8D3D263D263D765249C0.jpg)]
[外国连锁照片传送失败;发端站可能有一个反海盗链系统;照片应保存下来,供直接上载(img-eyffU5VY-1616618688379)(档案:D:APPQ1297878915ImageC2C28820CB6BB6BA1D32CB4CB4ED8FA5401B.jpg)]
- 必须指出,目前系统输入是U-disk的一个临时系统,必须使用系统复制(系统备份软件)复制到个人电脑上。
[外国连锁照片传送失败;发端站可能有一个隐形链机制;照片应保存,供直接上载(img-ln2.okZSI-161661868379)(档案:D:APPQ1297878915ImageC2CEB7CC3BA51FF1F027EAA588DA4DBF61.jpg)]
- 选择“ 复制用户数据文件 ”, 选择正确的挂载点, 并复制 Linux 交换分区 (/ swap) 和主数据分区 (/) 到硬盘上的正确位置 。 注意使用您创建的空分区, 以避免删除原计算机内容 。
[外国连锁照片传送失败;发端站可能有一个反海盗链系统;照片应保存下来,供直接上载(img-zkcicIcraI-1641661868808080)(档案://D:APQ1297878915ImageCB57B6A6A4F9F562FE6788AB2E8D44B9jpg)]
- 如果没有合适的挂载点或空间,可使用Ubuntu的 GParted 程序对硬盘进行再分配。
[外国连锁照片传送失败;源站可能有一个反海盗链系统;图像应保存下来供直接上载(IMg-Ra04bwsX-16416618688080)(档案:D:APQ1297878915ImagiC2(9A97CCF7A7871E7499F916535A7D73F.jpg)]
- 与Ubuntu系统进行硬盘连接。
- 为了避免无法启动的情况,最好首先处理触发问题,并节省大量麻烦。
[外国连锁照片传送失败;发端站可能有一个隐形链机制;照片应储存,以便直接上载(img-d SuHulwz-16416618683881)(档案:D:APPQ1297878915ImageC2D445DCE067385FDB48090C2A19EB4.11jpg)
- OK,大功告成!
错误及其解决办法
轻笔记本电脑可能无法被发现于一个有色人种的硬盘驱动器中,因此最好使用游戏本或带有机械硬盘的计算机,在未经承认的情况下,可以借鉴我学到的一些经验教训:
[外国连锁照片传送失败;发端站可能包含反海盗链系统;照片应当保存,以便直接上传(img-AQA8SZEQ-16416683881)(C:Users86156AppDataRoamingTyporatora-user-imagesimaage-202020090017576)。 [Png, png, png, png, png, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng)
镜像博客-CSDN博客_m0_48440870被系统复制。
ROS环境准备
ROS动能版与Ubuntu 16.04兼容。
安装过程
先设定来源 我不确定你在说什么
要打开终端,请按 CTRL+ALT+T 键入以下命令。
2、设置key
3. 一揽子最新情况
4. ROS 动脉动动脉动全版安装
5. 罗斯迪普的初始化
6、配置ROS环境
7、安装依赖项
9-ROS安装成功测试
(1) 按下 CTRL+ALT+T, 启动一个新的终端(定期), 并有以下命令来设置 ROS 环境 :
(2) 在一个新的终端上,键入以下命令,以弹出一个小海龟窗口:
(3) 当出现小海龟徽标时,将打开一个新的终端,并输入以下命令。
然后用箭扣 你可以控制小海龟的动作
如果你走这么远 说明ROS已经安装了
常见的错误及其固定
玫瑰内衣的故障和玫瑰内衣更新的故障是安装玫瑰内衣和玫瑰内衣更新过程中出现的两个最常见的困难。失败的原创失败大多可以通过试图改变程序源来解决。和玫瑰峰值更新失败 更困难。我把我的解决方案放在博客上, 我不确定我能完成它。再说一遍还不算太长:
[由于外国链条图象转移不成功,来源站可能有一个反海盗链机制,建议保留照片,以便直接上传(img-jg0w99TM-1616618683882)(C:Users86156AppDataRoamingTyporatopora-user-imagesimaage-202120108220943882)。 [Png, png, png, png, png, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng
缺失解决方案摘要( 解决) _m0_ 48440870 博客- CSDN 博客_rosdep 更新失败
安装BaxterSDK。。
以下介绍如何在动能方面建立巴克斯特环境:
1. 建立ROS工作空间。
2、Source ROS
记住每次你打开终端时在执行与ros有关的命令之前,双方都必须执行上一个命令。为了绕过这一耗时的程序,您可以提前计划。 此命令将被添加到当前系统主目录中的 Bashrc 文件 。结果每次登入时该系统将自动帮助您执行这些指令,并用于创建环境。
3、编译与安装
因为此步骤将在新建的工作空间 ros_ws 中进行, 请先更新工作目录路径到 ros_ws 。
4. 必须安装SDK附属装置。
**5. **对Baxter SDK公司的投资
(1) 在Baxter Github自动核实所需来源,并利用Wstool空间工具安装在ROS工作空间(即ros_ws)中。
完成程序需要更长的时间,如果计算机不翻过墙壁,它很可能无法运作,因此,最好是在整个安装过程中使用VPN连接。
(2) Source ROS
(3)编译与安装
同样,此步骤也必须在ros_ws路径下完成, 所以首先导航到ros_ws路径 。
安装巴克斯特模拟环境
安装Gazebo
Gazebos可以模仿其物理环境,安装如下:
1、添加源
2. Gazebo建筑
3个 找个观光师来
Gazebo可以模仿巴克斯特的物理模型和周围环境。
[由于外国链条图象传输失败,来源站可能有一个反海盗链机制,建议保留照片供直接上传(IMG-8IBH4Zg-1616683882)(C: Users86156AppDataRoamingTyporatopora-user-imagesimage-2020202009001651017]。 [Png, png, png, png, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng, peng)
安装Rviz
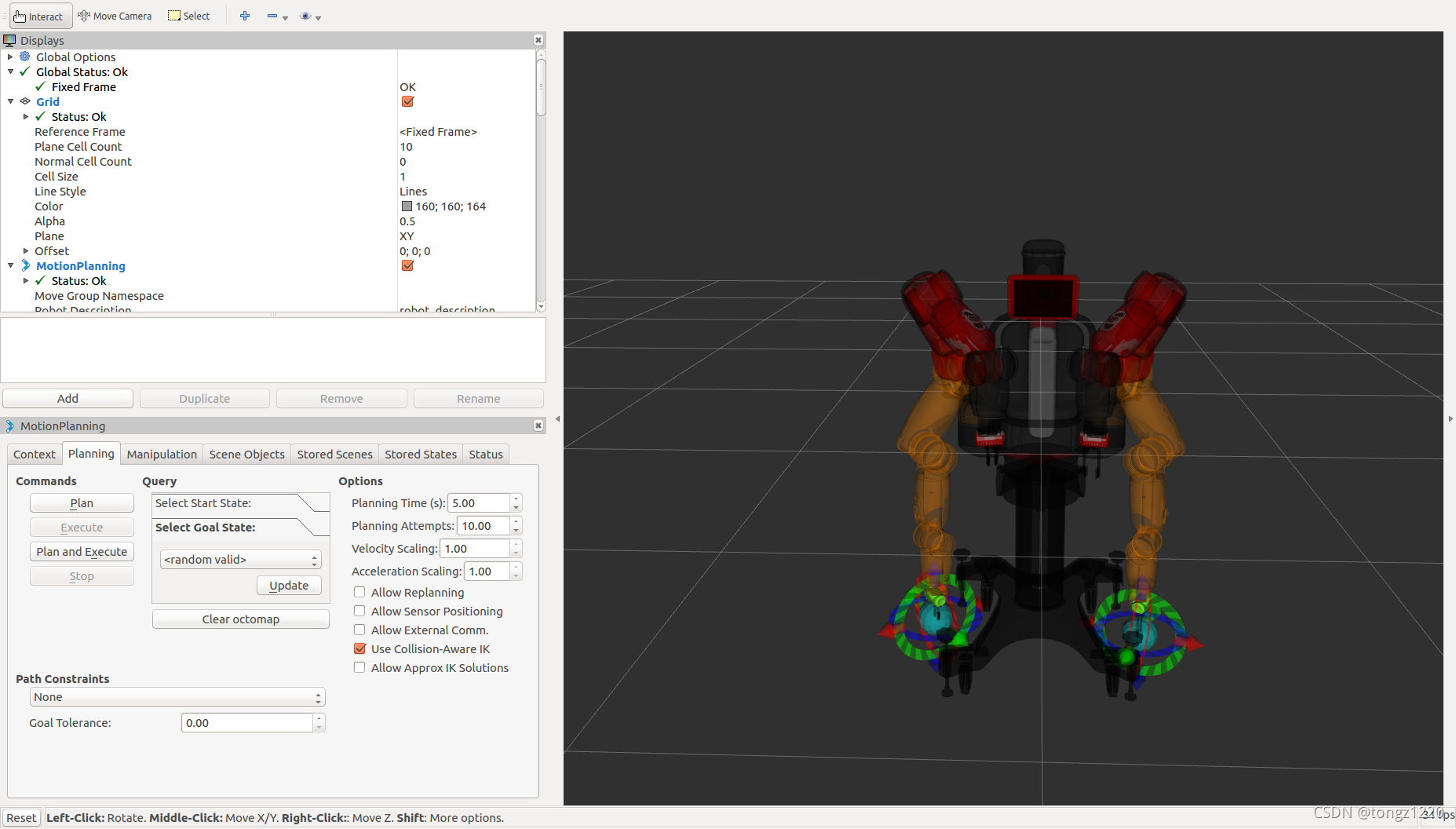
Rviz是一种可视化工具,可用于数据阅读和动能规划。
1、安装Rviz
2. 确保安装良好的测试
3、运行
(1) 在罗斯环境下扶持性终端运行
(2) 在一个新的终端内发射rviz。
rviz显示了Baxter的参数,rviz开放的结果如下:
最好不要选择一本商业书或另一本笔记本。它将会发生。
systemback硬盘的状态无法确定,导致没有系统复制。